

MiL, SiL, PiL, HiL, DiL, And ViL Testing Methods In Automotive
Hello guys, welcome back to our blog. In this article, we will discuss MiL, SiL, PiL, HiL, DiL, and ViL testing methods in Automotive. Which one is the best method? Model in loop, software in loop, processor in loop, hardware in loop, driver in loop, and vehicle in loop.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Battery Management Systems (BMS): A Complete Guide
- How The Infotainment System Is Connected In A Vehicle
- Top ECU Testing Tools: A Complete Guide To Automotive Validation & Simulation
MiL, SiL, PiL, HiL, DiL, And ViL Testing Methods
Automotive systems are becoming increasingly complex, with the integration of advanced control algorithms, software, and hardware components. Ensuring that these systems function correctly and reliably before deployment is a critical challenge in the automotive industry. To address this, engineers employ various testing methodologies that allow for progressive validation, from early-stage simulations to real-world testing.
In this article, we explore six key testing techniques used in automotive development: Model-in-the-Loop (MiL), Software-in-the-Loop (SiL), Processor-in-the-Loop (PiL), Hardware-in-the-Loop (HiL), Driver-in-the-Loop (DiL), and Vehicle-in-the-Loop (ViL). Each of these methods plays a vital role in verifying and refining automotive systems, ensuring they meet performance, safety, and reliability standards before vehicles hit the road.
Model-in-the-Loop (MiL) Testing
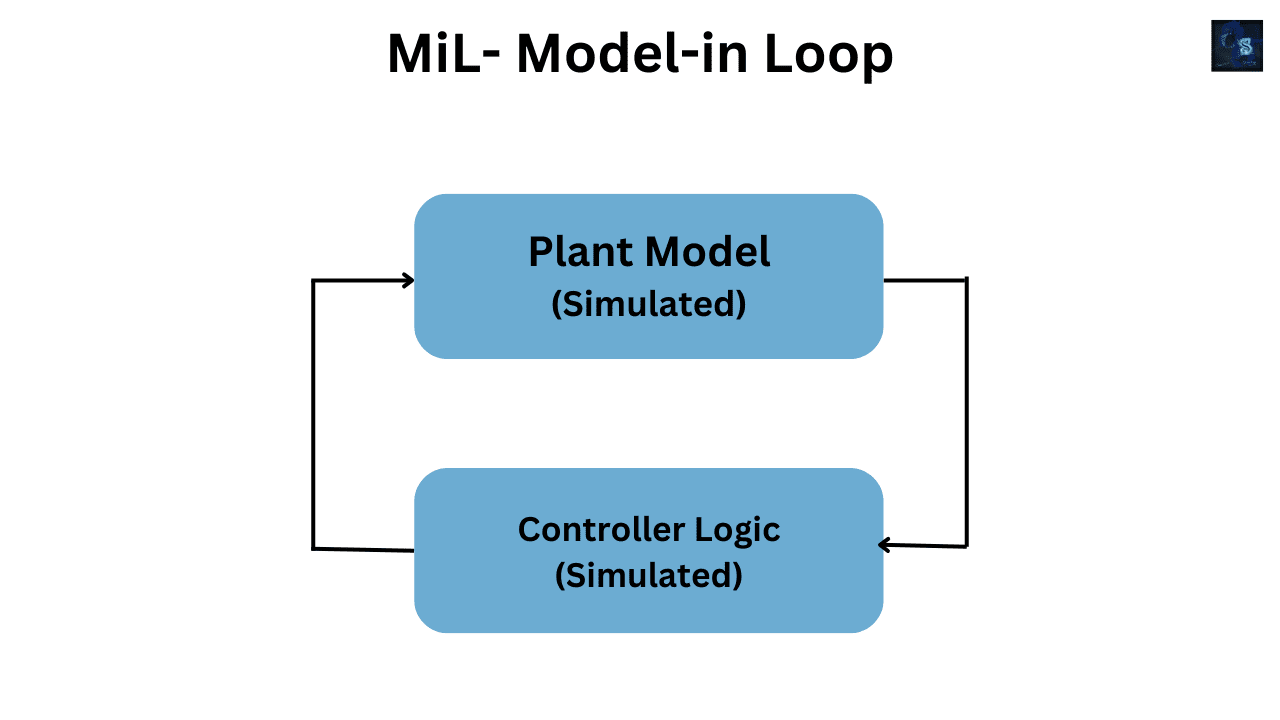
Model-in-the-loop (MiL) is the first stage in the testing process. In MiL, both the plant—which represents the vehicle’s dynamics—and the controller, which houses the control algorithms, are fully simulated. This early testing phase allows engineers to develop and refine algorithms without the need for any hardware.
By using virtual models, designers can quickly iterate on control strategies, simulate various scenarios, and identify issues early on. It’s a cost-effective way to validate ideas before any physical prototypes are built.
Benefits of Model-in-the-Loop (MiL)
- Early Detection of Errors: Since both the plant and controller are simulated, design flaws and algorithmic issues can be identified in the early stages, reducing costly fixes later.
- Rapid Iteration and Development: Engineers can modify control algorithms, simulate different scenarios, and test performance efficiently without waiting for physical prototypes.
- Cost-Effective Testing: MiL minimizes the need for hardware resources in the early stages, saving both development costs and time.
- Enhanced Design Optimization: Engineers can fine-tune control strategies by analyzing simulation results, ensuring optimal performance before moving to the next testing phase.
- Integration with Advanced Simulation Tools: MiL can be integrated with simulation software like MATLAB/Simulink, allowing for a seamless transition to Software-in-the-Loop (SiL) testing.
Software-in-the-loop (SiL)
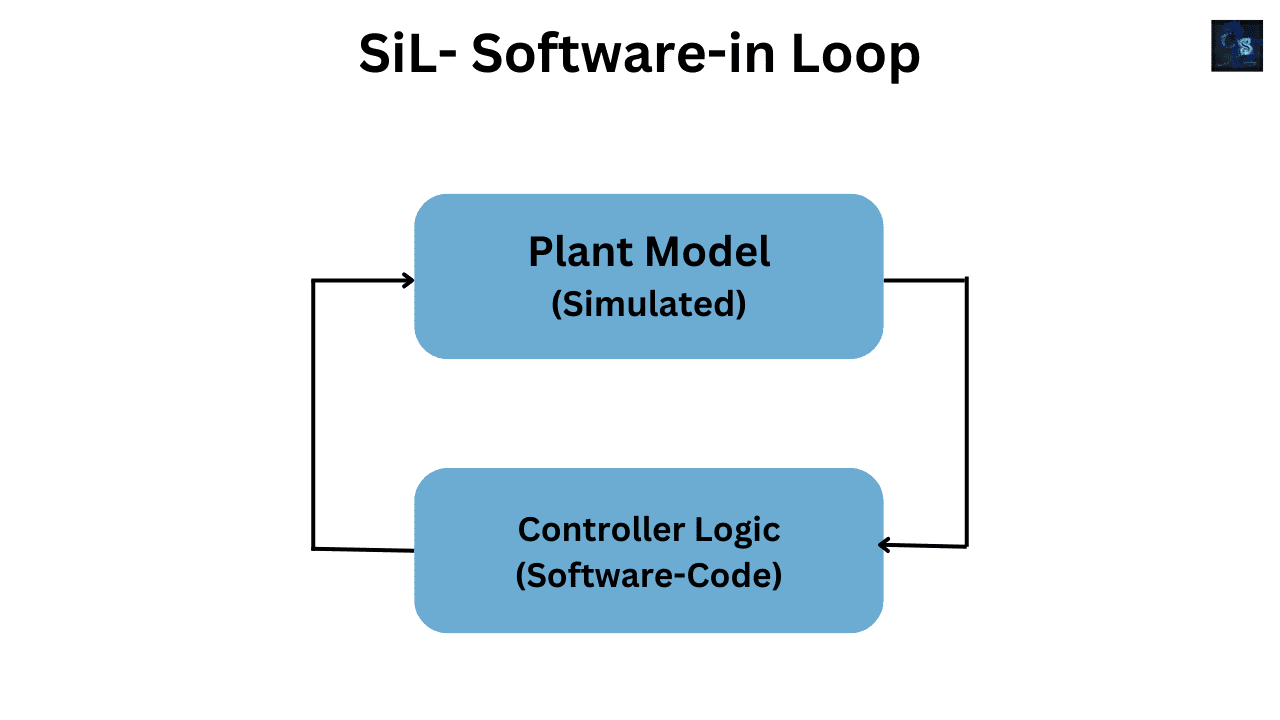
Software-in-the-loop (SiL) is the next step in the validation process. At this stage, the plant is still simulated, but the controller is now the actual software code that has been written and compiled. For example, if SiL is developed in Simulink, S-functions will be found inside the controller. SiL bridges the gap between theoretical design and practical implementation.
Testing the actual code within a virtual plant environment helps developers catch software bugs, verify algorithm accuracy, and ensure that the code behaves as expected before it ever meets hardware.
Benefits of Software-in-the-Loop (SiL)
- Realistic Software Testing: Allows for evaluating actual software behavior within a controlled, simulated plant environment.
- Bug Identification: Helps detect coding errors and software logic issues early in the development cycle.
- Improved Algorithm Validation: Ensures that control algorithms function as expected before moving to hardware.
- Accelerated Development Process: Enables parallel software and system testing, reducing time-to-market.
- Seamless Transition to Hardware Testing: Provides a smooth progression to Processor-in-the-Loop (PiL) testing.
Processor-in-the-Loop (PiL)
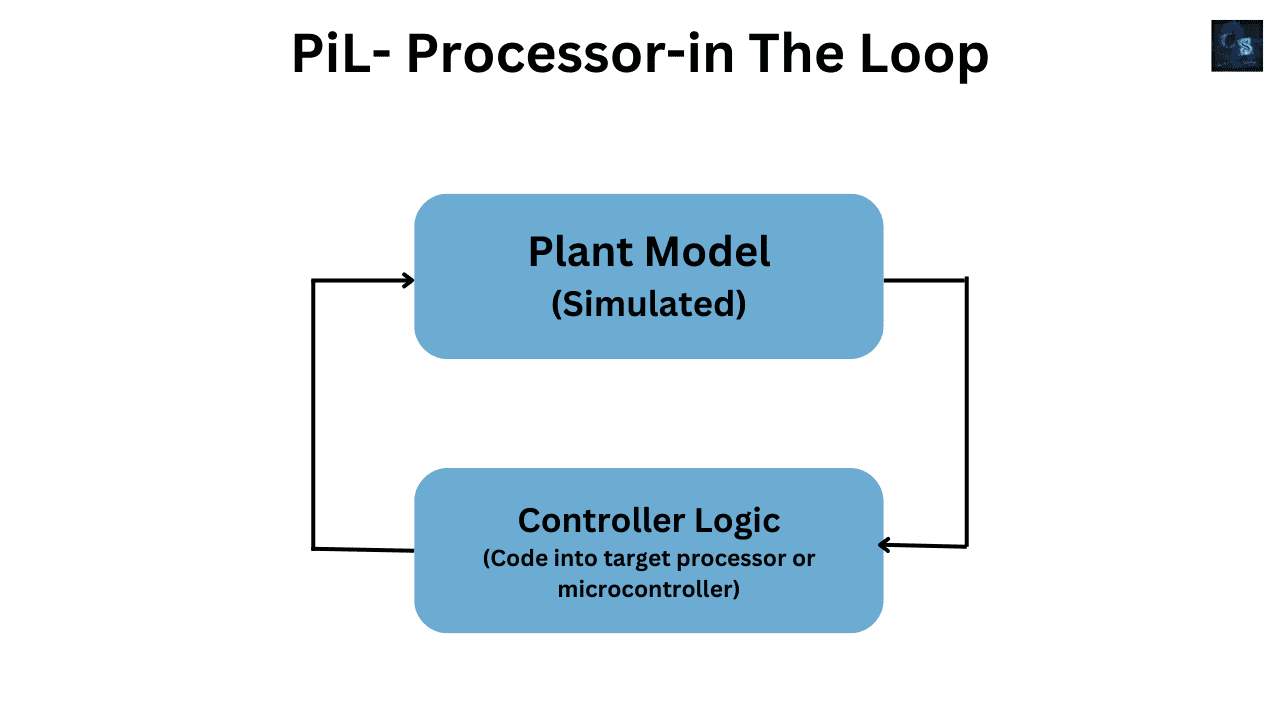
Processor-in-the-loop (PiL) adds another layer of realism. While we continue using a simulated plant, the controller code now runs on the target processor or microcontroller. This is crucial for evaluating the real-time performance and execution characteristics of the code.
PiL testing verifies that the hardware can handle the computational demands of the software. It helps identify any timing issues, latency, or performance bottlenecks that might occur once the system is deployed in a real-world scenario.
Benefits of Processor-in-the-Loop (PiL)
- Hardware Performance Evaluation: Helps determine if the target processor can handle the computational workload.
- Real-Time Execution Testing: Assesses execution speed, latency, and timing accuracy.
- Identification of Hardware-Specific Issues: Detects potential problems related to memory constraints or processor capabilities.
- Optimized Code Execution: Ensures efficient code execution on the target processor.
- Bridges Software and Hardware Integration: Prepares the system for the next step—Hardware-in-the-Loop (HiL) testing.
Hardware-in-the-loop (HiL)
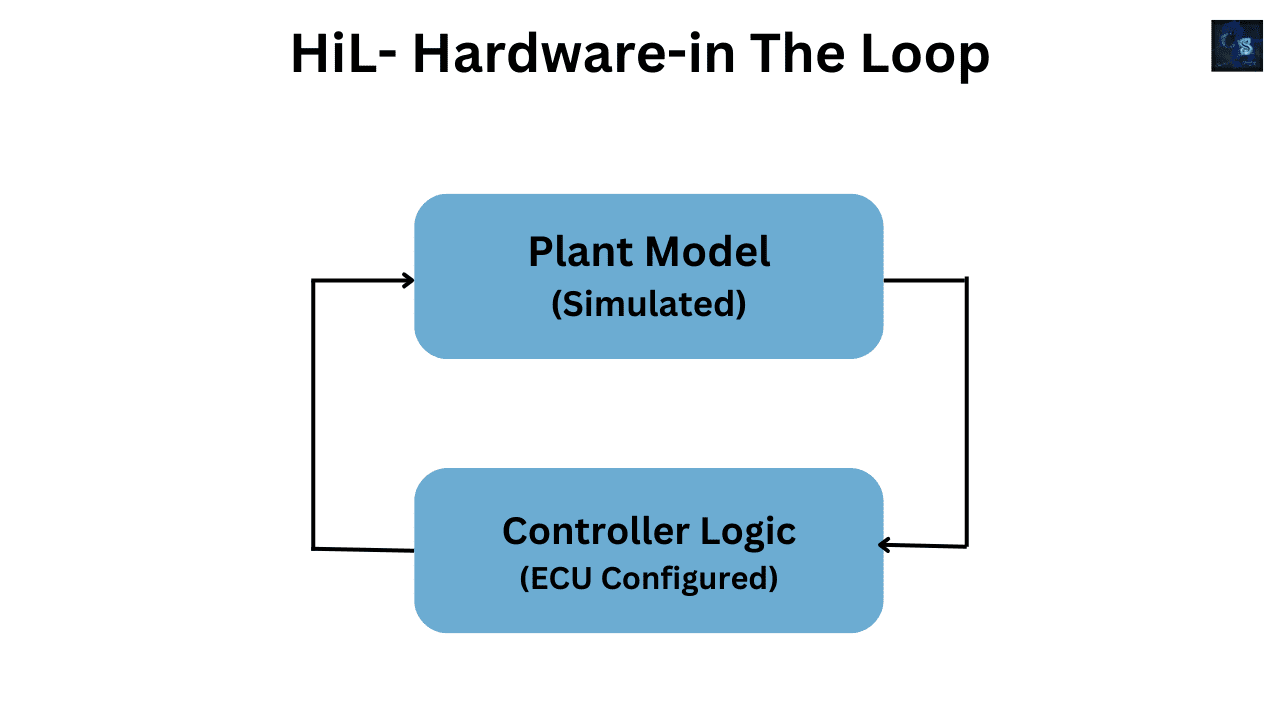
Hardware-in-the-Loop (HiL) is where we introduce real hardware into the testing process. Although the plant model remains simulated, the ECU operates in its true hardware configuration. HiL testing is critical because it validates the ECU’s behavior in a controlled environment, ensuring that it will perform reliably when integrated into the vehicle.
By simulating a variety of operational scenarios, engineers can detect potential issues, fine-tune performance, and guarantee that the system meets all safety and performance standards before full-scale vehicle integration.
Benefits of Hardware-in-the-Loop (HiL)
- Real ECU Testing: Evaluates the actual hardware’s interaction with simulated vehicle models.
- Improved Safety Assurance: Identifies potential safety concerns before real-world deployment.
- Comprehensive Scenario Testing: Simulates diverse road, weather, and driving conditions.
- Regulatory Compliance Verification: Ensures the system meets industry standards.
- Cost-Efficient Validation: This reduces the need for expensive full-vehicle prototypes.
Driver-in-the-Loop (DiL)
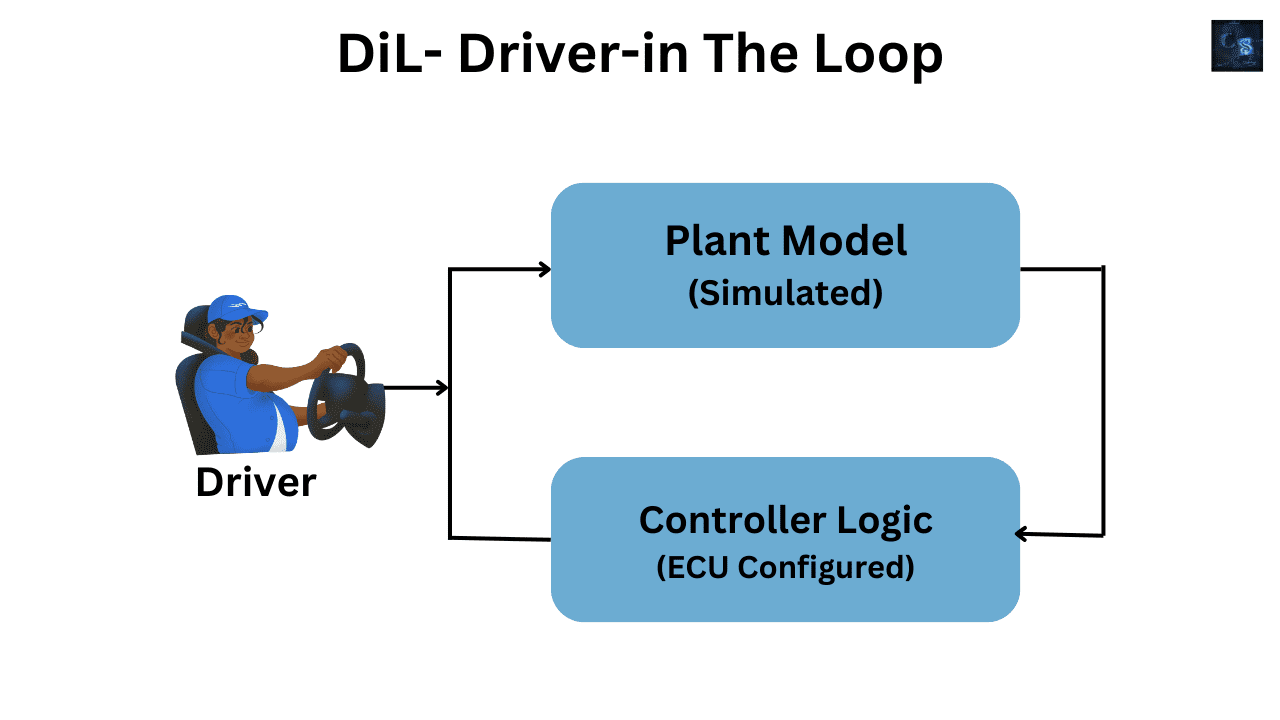
Driver-in-the-loop (DiL) introduces the human element into our testing process. Here, a real driver interacts with a simulator that incorporates both the plant model and the controller. This approach is key to understanding how drivers respond to various driving conditions, and it’s particularly important for advanced driver-assistance systems (ADAS) and autonomous vehicle testing.
Benefits of Driver-in-the-Loop (DiL)
- Human Response Analysis: Evaluates how real drivers interact with the system.
- ADAS & Autonomous Testing: Validates driver-assistance and autonomous functions.
- Enhanced Ergonomics & Usability: Ensures intuitive interface design for drivers.
- Driver Behavior Modeling: Helps in creating realistic driving scenarios.
- Supports Training & Research: Can be used for driver training and behavioral studies.
Vehicle-in-the-Loop (ViL)
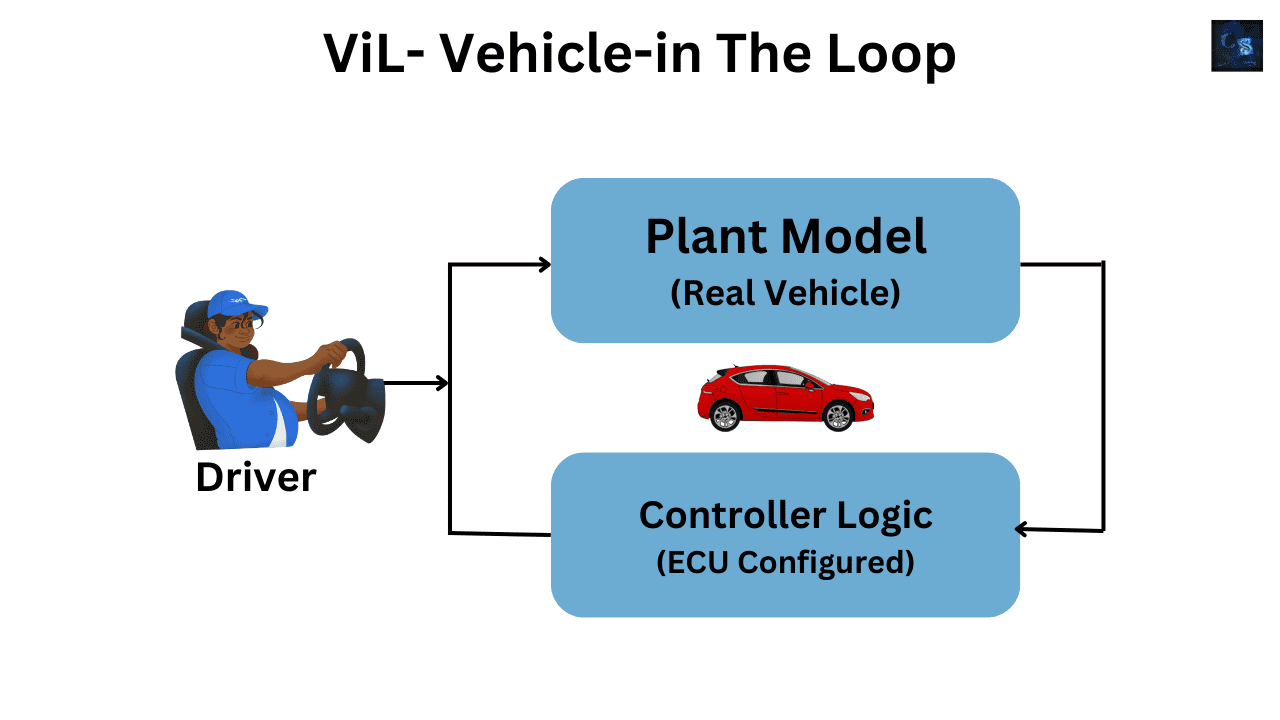
Vehicle-in-the-loop (ViL) is the final stage of the validation process. This method involves testing the real vehicle while it interacts with a simulated environment. ViL testing provides the ultimate validation by combining the complexities of a real-world vehicle with the control and repeatability of simulation.
Benefits of Vehicle-in-the-Loop (ViL)
- Real-World Testing with Simulation Control: Merges real vehicle data with controlled simulations.
- Validation in Complex Scenarios: Tests vehicle behavior under diverse conditions, such as varying road types and weather.
- Final System Integration Check: Ensures all components function harmoniously before production.
- Enhanced Vehicle Safety & Performance: Confirms reliability in real-world driving scenarios.
- Regulatory & Compliance Testing: Helps meet automotive industry standards before mass production.
Comparison Table of Testing Methods
| Testing Method | Controller Used | Plant Used | Hardware Used | Purpose |
| Model-in-the-Loop (MiL) | Simulated | Simulated | No | Early-stage validation of control algorithms |
| Software-in-the-Loop (SiL) | Actual Software | Simulated | No | Validates software implementation before deploying to hardware |
| Processor-in-the-Loop (PiL) | Processor-Based | Simulated | Yes (Target Processor) | Tests software execution on the actual target processor |
| Hardware-in-the-Loop (HiL) | Real ECU | Simulated | Yes (ECU) | Validates real ECU behavior with simulated vehicle dynamics |
| Driver-in-the-Loop (DiL) | Real Controller | Simulated | Yes (Driver Interface) | Evaluates human interaction with vehicle systems |
| Vehicle-in-the-Loop (ViL) | Real Controller | Real Vehicle | Yes (Vehicle & Sensors) | Tests vehicle behavior in real-world scenarios with simulation influence |
Each of these testing stages plays a critical role in ensuring that vehicles are safe, reliable, and ready for the road. Whether you’re a developer, engineer, or just an automotive enthusiast, understanding these methodologies is key to appreciating the complexity behind modern vehicle systems.
This was about “MiL, SiL, PiL, HiL, DiL, And ViL Testing Methods In Automotive“. Thank you for reading.
Also, read:
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway
- 8 Reasons Why EVs Can’t Fully Replace ICE Vehicles in India
- A Complete Guide To FlexRay Automotive Protocol
- Adaptive AUTOSAR Vs Classic AUTOSAR: Which One For Future Vehicles?
- Advanced Driver Assistance Systems (ADAS): How To Become An Expert In This Growing Field