
GPS vs IMU vs Sensor Fusion: The Complete Guide for Accurate Vehicle Localization
Hello guys, welcome back to our blog. In this article, I will discuss GPS vs IMU vs Sensor fusion and which one is best for accurate vehicle localization.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Top 100 StateFlow Interview Questions With Answers
- HMI Challenges In Shared Control Between Driver And ADAS
- SLAM In ADAS: Simultaneous Localization And Mapping For Next-Generation Driver Assistance
GPS vs IMU vs Sensor Fusion
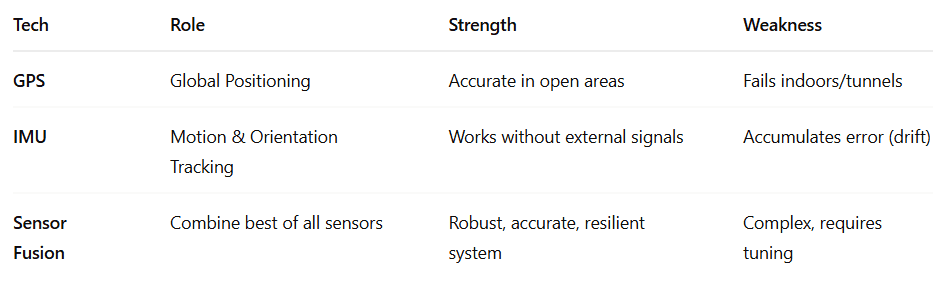
Accurate vehicle localization is a cornerstone of modern automotive technology. From basic GPS navigation systems to advanced driver assistance systems (ADAS) and autonomous driving, understanding a vehicle’s position and motion is vital. However, no single sensor system is perfect. GPS offers global positioning but suffers in urban environments and indoors.
IMU delivers real-time motion data but accumulates errors over time. Sensor fusion, the combination of GPS, IMU, and other sensor inputs, provides a robust, accurate, and resilient solution for precise localization. This comprehensive article explores GPS, IMU, and sensor fusion technologies in-depth, highlighting their principles, strengths, limitations, integration techniques, and real-world applications in the automotive industry.
1. Fundamentals of Vehicle Localization
Vehicle localization refers to determining the position and orientation of a vehicle in a given environment. It is essential for various applications, including navigation, fleet tracking, autonomous driving, and geofencing. Localization can be absolute or relative. Absolute localization uses global references (e.g., GPS coordinates), while relative localization relies on local measurements such as wheel odometry or inertial data.
Multiple technologies are combined to achieve high-precision localization. These typically include satellite navigation systems, inertial sensors, odometry sensors, and vision systems. The reliability of localization systems directly impacts safety, efficiency, and user experience in automotive applications.
Precise localization is vital not only for vehicle autonomy but also for seamless navigation, real-time traffic management, and efficient logistics. As the automotive industry transitions toward smarter and more autonomous vehicles, the role of robust localization technologies becomes increasingly significant. Moreover, localization data plays a crucial role in predictive analytics, enabling vehicles to anticipate road conditions, adjust routes in real time, and even communicate with infrastructure elements such as smart traffic lights and pedestrian signals.
2. Global Positioning System (GPS)
2.1 Overview
GPS is a satellite-based navigation system that provides location and time information globally. It consists of a network of satellites orbiting the Earth and ground control stations that maintain the system.
2.2 How GPS Works
A GPS receiver calculates its position by measuring the time it takes for signals from multiple satellites to reach it. By knowing the exact position of each satellite and the signal travel time, the receiver uses trilateration to estimate its own position.
2.3 Accuracy and Limitations
Civilian GPS typically provides an accuracy of 3-10 meters. Advanced techniques like Differential GPS (DGPS) and Real-Time Kinematic (RTK) positioning can improve accuracy to the centimeter level. However, GPS signals can be blocked or reflected in urban canyons, tunnels, or dense forests, leading to signal loss or multipath errors.
Interference from natural elements like heavy rain or snowfall and intentional jamming by signal-blocking devices can also degrade GPS performance. GPS spoofing—where false signals are transmitted to mislead receivers—poses a serious security concern, particularly for autonomous vehicles relying solely on GPS for navigation.
2.4 Applications in Automotive Systems
GPS is widely used in navigation systems, telematics, route optimization, and geofencing. In autonomous vehicles, it provides a global reference for position estimation. GPS data is also instrumental in developing and updating digital maps, monitoring vehicle health, and offering location-based services.
3. Inertial Measurement Units (IMUs)
3.1 Overview
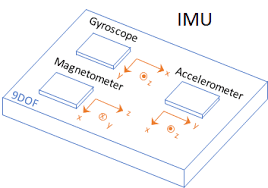
IMUs are sensors that measure linear acceleration and angular velocity. A typical IMU includes accelerometers and gyroscopes, and sometimes magnetometers.
3.2 How IMUs Work
Accelerometers detect changes in velocity, while gyroscopes measure rotational movement. The sensor data is used to estimate changes in position and orientation over time.
3.3 Drift and Calibration
IMUs suffer from integration drift. Small measurement errors accumulate over time, leading to large deviations in position estimation. Regular calibration and sensor fusion with GPS or other sources are required to mitigate this.
Calibration involves techniques such as zero-velocity updates (ZUPTs), known-motion events, or external references like magnetometers. Even so, IMUs cannot replace GPS for long-term localization without drift unless supported by external corrections.
3.4 Applications in Vehicles
IMUs are used for dead reckoning, stability control, rollover detection, and aiding GPS in localization. In autonomous systems, they provide high-frequency updates of the vehicle’s dynamics. These sensors are crucial during GPS outages—such as driving through tunnels or parking garages—allowing the vehicle to estimate its movement with continued reliability.
4. Sensor Fusion for Localization
4.1 What is Sensor Fusion?
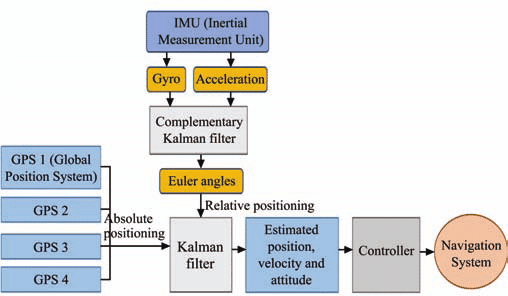
Sensor fusion involves combining data from multiple sensors to produce a more accurate and reliable estimate than any single sensor could provide. In vehicle localization, this typically involves fusing GPS and IMU data and optional inputs from LiDAR, radar, cameras, and wheel encoders.
4.2 Sensor Fusion Algorithms
- Kalman Filter (KF): Assumes linear system models and Gaussian noise. Suitable for simple GPS+IMU fusion.
- Extended Kalman Filter (EKF): A nonlinear extension of KF; widely used in automotive applications.
- Unscented Kalman Filter (UKF): This handles nonlinearities better than EKF.
- Particle Filter: Uses a probabilistic sampling approach; suitable for complex environments.
- AI-Based Fusion: Neural networks and deep learning models are emerging for complex fusion tasks.
These algorithms weigh data from different sources based on their uncertainty and reliability. A well-tuned fusion algorithm can provide centimeter-level accuracy even in adverse conditions.
4.3 Benefits of Sensor Fusion
Sensor fusion provides the best of all worlds: the absolute accuracy of GPS and the high-frequency, low-latency updates of IMU. It allows localization to continue seamlessly even when GPS signals are lost or degraded. Sensor fusion also enhances robustness, ensuring a fail-safe operation in safety-critical systems.
4.4 Implementation Challenges
Sensor synchronization, real-time data processing, and sensor noise modeling are major challenges. Computational load and the need for robust algorithms make implementation non-trivial. Additionally, temperature variations, sensor degradation over time, and alignment errors between sensors must be accounted for.

5. Real-World Applications and Use Cases
5.1 Autonomous Driving
Autonomous vehicles rely heavily on sensor fusion for localization. GPS provides a global reference, IMU fills in during GPS outages, and LiDAR/camera data ensures lane-level accuracy. Redundant sensors ensure the system continues operating safely even if one or more inputs fail.
5.2 Advanced Driver Assistance Systems (ADAS)
Systems like lane-keeping assist, adaptive cruise control, and emergency braking require precise localization to understand the vehicle’s surroundings and context. For instance, adaptive cruise control needs to know the exact distance to vehicles ahead, while lane centering systems require high-definition maps aligned with real-time sensor data.
5.3 Fleet Management and Telematics
Accurate localization enables route optimization, predictive maintenance, and efficient asset tracking. Fleet operators can improve efficiency, reduce costs, and provide better customer service through real-time vehicle monitoring and diagnostics.
5.4 Off-Road and Agricultural Vehicles
In environments where GPS is unreliable, IMUs and local sensors provide critical support for navigation and operations. These vehicles often rely on custom fusion strategies tailored to their unique environmental and functional requirements.
5.5 Emergency and Military Vehicles
Precision navigation in GPS-denied environments is crucial for mission-critical applications. Military-grade IMUs combined with encrypted GPS and SLAM technologies ensure uninterrupted localization under any condition.
6. Integration with Other Technologies
6.1 Visual Odometry and SLAM
Visual-inertial odometry combines camera data with IMU measurements for robust localization. Simultaneous Localization and Mapping (SLAM) is also widely used in indoor and complex environments. SLAM helps build a map of an unknown environment while simultaneously tracking the vehicle’s location within it.
6.2 LiDAR and Radar Integration
LiDAR and radar enhance localization in poor lighting or adverse weather conditions. Fusion with GPS and IMU provides redundancy and robustness. Radar, with its resistance to rain and fog, complements vision-based systems effectively.
6.3 Map Matching and HD Maps
Using HD maps, vehicles can compare real-time sensor data with known road features to enhance localization accuracy. Features like lane boundaries, traffic signs, and road curvature offer context that GPS alone cannot provide. HD maps are continuously updated using crowd-sourced and vehicle-collected data, ensuring relevancy.
7. Performance Metrics and Evaluation
Localization systems are evaluated based on:
- Accuracy: Positional deviation from ground truth
- Latency: Delay between motion and localization update
- Robustness: Performance in challenging environments
- Continuity: Ability to maintain localization during sensor failures
- Cost: Affordability of the sensor suite
Benchmarking tools and ground-truth systems such as RTK-GPS, motion capture setups, or controlled environments help validate system performance. Real-world testing, including urban, rural, and highway environments, is necessary for comprehensive evaluation.
8. Future Trends in Localization
The future of vehicle localization will be shaped by:
- Affordable RTK-GPS systems for mass-market vehicles
- AI and deep learning for adaptive sensor fusion
- 5G-enabled V2X communication for cooperative localization
- Quantum sensors for drift-free inertial navigation
- Cloud-based localization services using real-time map updates
Crowdsourced localization, where data from multiple vehicles is aggregated to improve map and position accuracy, is another emerging trend. As more vehicles contribute to shared HD maps, the accuracy and freshness of localization data will drastically improve.
Conclusion
No single sensor can meet all the demands of modern vehicle localization. GPS, while globally accurate, fails in obstructed environments. IMUs are fast and responsive but drift over time. Sensor fusion bridges these gaps, delivering a robust, accurate, and real-time localization system essential for autonomous driving, safety systems, and connected vehicle technologies. As vehicles become more intelligent and autonomous, advanced sensor fusion will play a central role in shaping the future of mobility.
In a world moving towards full automation, the synergy between GPS, IMU, and sensor fusion isn’t just an engineering choice — it’s a necessity. The evolution of localization systems will continue to unlock new possibilities in transportation, urban planning, and smart infrastructure, making travel safer, faster, and more efficient than ever before.
This was about “GPS vs IMU vs Sensor Fusion“. Thank you for reading.
Also, read:
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway
- 8 Reasons Why EVs Can’t Fully Replace ICE Vehicles in India
- A Complete Guide To FlexRay Automotive Protocol
- Adaptive AUTOSAR Vs Classic AUTOSAR: Which One For Future Vehicles?
- Advanced Driver Assistance Systems (ADAS): How To Become An Expert In This Growing Field