
Basic MATLAB Simulink Blocks Engineers Must Know
Hello guys, welcome back to our blog. Here in this article, I will discuss some of the most common basic MATLAB Simulink blocks that every automotive engineer must know and the usage of each block.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Top Software Compliance Standards Across Industries
- Top HiL Hardware In Loop Automotive Players In Market
- HiL VT System Interview Questions With Answers
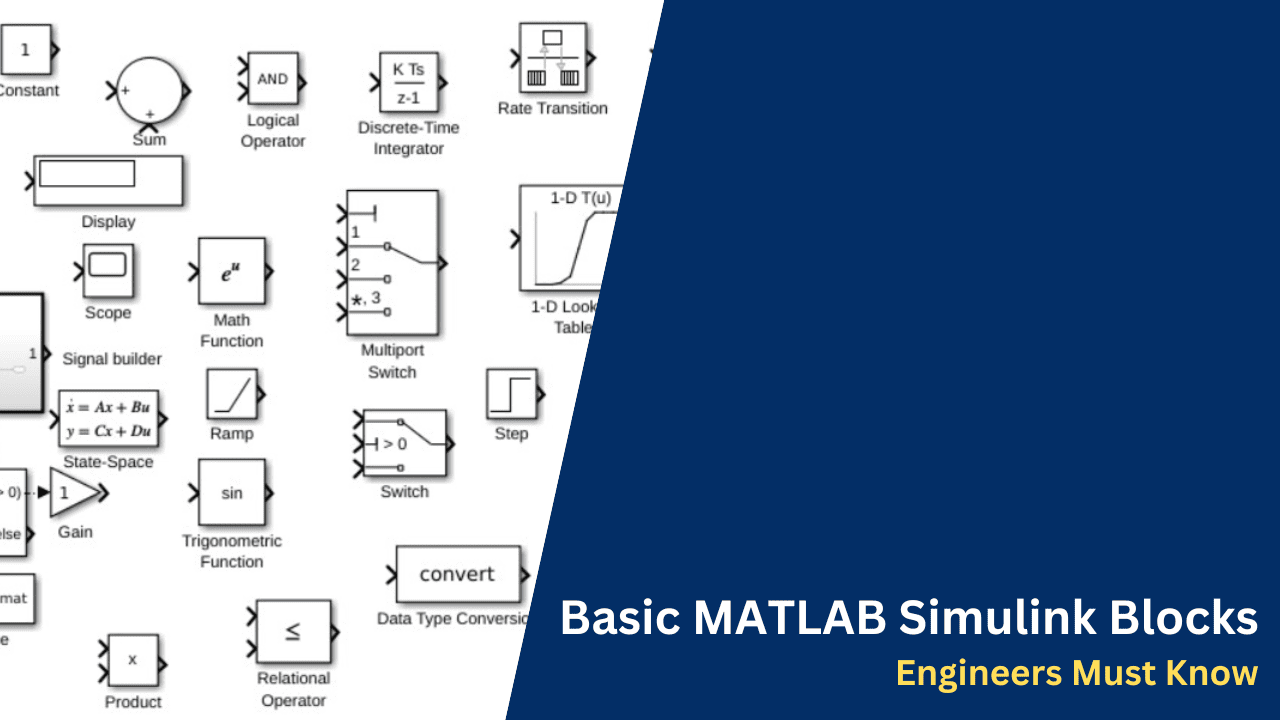
Basic MATLAB Simulink Blocks
If you’re diving into Model-Based Development (MBD), mastering Simulink is a must! Whether you’re designing control systems, simulating dynamic models, or integrating automotive features, Simulink provides powerful blocks to bring your ideas to life.
01. Source Blocks
a. Constant

- Produces a fixed scalar or vector value during the entire simulation.
- Ideal for setting initial conditions or providing reference values.
- It can be dynamically tuned without re-running the model.
- Supports scalar, vector, or matrix values.
- Commonly used in parameter sweeps and control systems.
b. Step

- Generates a signal that changes from one level to another at a specified time.
- Useful for testing the transient response of control systems.
- Customizable parameters include initial value, final value, and step time.
- Simulates a sudden change in input conditions.
- Frequently used in disturbance testing and PID tuning.
c. Pulse Generator
- Produces square or rectangular waveforms with user-defined amplitude and frequency.
- Parameters include pulse width, period, and phase delay.
- Useful for testing digital systems or triggering events.
- Generates repetitive signals suitable for clock-like behaviors.
- Supports periodic signals for PWM and timing analysis.
d. Sine Wave

- Produces a sinusoidal signal of specified amplitude and frequency.
- Useful for modeling periodic inputs like AC voltage or oscillatory systems.
- It can include phase shifts to simulate delayed sine waves.
- Supports continuous and discrete modes of operation.
- Commonly used in resonance and vibration system testing.
e. Signal Builder
- Enables the creation of custom signal waveforms through a graphical interface.
- Supports multi-dimensional signals for complex input profiles.
- Facilitates batch simulations with different signal variations.
- Useful for testing real-world scenarios with irregular inputs.
- Signals can be saved and reused across different models.
f. Ramp

- Generates a linearly increasing or decreasing signal over time.
- Parameters include slope, initial output, and start time.
- Tests system behavior under gradual input changes.
- Common in velocity profile testing and ramp-up behaviors.
- Simulates real-world scenarios like motor acceleration.
02. Sink Blocks
a. Scope

- Displays signal behavior over time in a graphical format.
- Supports single or multiple signals in one window.
- Enables live monitoring during simulation.
- Provides options for zooming, scaling, and cursors for detailed analysis.
- A primary debugging tool for dynamic systems.
b. To Workspace
- Exports signal data to MATLAB workspace for further processing.
- Stores data as arrays, structures, or time-series objects.
- Facilitates post-simulation analysis like plotting or FFT.
- Allows MATLAB scripts to manipulate and analyze results.
- Commonly used for automated testing and data logging.
c. Display
- Shows the value of scalar signals during simulation.
- Useful for monitoring key parameters without additional plots.
- Limited to scalar values for simplicity.
- Ideal for debugging and quick checks.
- Can be placed near critical points for real-time observation.
d. To File
- Saves simulation data directly to a .mat file.
- Facilitates long-term storage and sharing of results.
- Stores data in a structured format for easy access.
- Supports automatic overwriting or incremental naming.
- Ideal for large-scale simulations requiring detailed logs.
03. Mathematical Operations
a. Gain

- Multiplies the input signal by a constant (gain value).
- Simplifies scaling operations in control systems.
- Accepts scalar or vector inputs for different dimensions.
- Supports time-varying gain when combined with other blocks.
- Common in amplifier modeling and proportional control.
b. Sum
- Adds or subtracts multiple input signals based on the configuration.
- Configurable for custom operations like +, -, ±, etc.
- Handles scalar, vector, or matrix signals.
- Commonly used in feedback loops and system models.
- Simplifies arithmetic operations in models.
c. Product

- Multiplies two or more input signals.
- Supports element-wise or matrix multiplication.
- Ideal for gain chains, power calculations, and logic models.
- Configurable for scalar, vector, or matrix dimensions.
- Widely used in control systems and signal scaling.
d. Math Function

- Performs mathematical operations like sin, sqrt, abs, exp, etc.
- Supports element-wise or complex operations.
- Highly flexible for different mathematical transformations.
- Used in signal processing and advanced modeling.
- Simplifies model development by eliminating manual calculations.
e. Trigonometric Function

- Computes trigonometric functions like sin, cos, tan, etc.
- Supports hyperbolic and inverse trigonometric calculations.
- Useful for angle-related computations in robotics and control.
- Accepts radians or degrees as input based on configuration.
- Commonly used in motion systems and oscillatory models.
04. Logical and Relational Operations
a. Logical Operator

- Performs logical operations like AND, OR, XOR, and NOT.
- Accepts scalar or vector inputs for multi-bit operations.
- Outputs boolean values (true/false or 1/0).
- Useful for control logic, decision-making, and digital systems.
- Frequently used in embedded systems and state machines.
b. Relational Operator
- Compares two inputs using operators like >, <, ==, etc.
- Outputs a boolean signal based on the comparison result.
- Supports scalar and vector comparisons.
- Useful for threshold checks and conditional execution.
- Commonly applied in system triggers and safety checks.
c. Switch
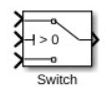
- Selects one of two inputs based on a control condition.
- The control input determines whether to output the first or second signal.
- Used for decision-making and dynamic signal routing.
- Handles scalar, vector, and matrix inputs.
- Common in fault-tolerant and backup systems.
d. Multiport Switch

- Selects one of multiple inputs based on a control index.
- Control input is typically an integer indicating the chosen input.
- Simplifies signal routing in complex systems.
- Supports scalar and vector signals for dynamic selection.
- Used in multi-mode systems and reconfigurable designs.
e. Compare to Zero

- Compares an input signal against zero using relational operators.
- Outputs boolean signals for logic control.
- Simplifies common checks like positive, negative, or zero values.
- Useful for triggers and conditional logic.
- Eliminates the need for additional blocks for zero checks.
05. Signal Routing
a. Mux

- Combines multiple input signals into a single composite signal.
- Creates a vector from scalar or vector inputs.
- Useful for signal bundling in models with multiple signals.
- Simplifies input handling for subsystems and functions.
- Common in multi-channel systems and dynamic models.
b. Demux

- Splits a composite signal into individual signals.
- Extracts elements of a vector signal into separate outputs.
- Ideal for processing individual channels of a composite signal.
- Complements the Mux block in signal flow management.
- Used in subsystems requiring separate channel processing.
c. Selector

- Extracts specific elements or rows/columns from a vector or matrix.
- Highly configurable for dynamic selection based on indices.
- Simplifies operations on large datasets or signals.
- Useful for selecting data subsets in signal processing.
- Supports real-time reconfiguration during simulation.
d. Bus Creator

- Combines multiple signals into a bus for organized routing.
- Allows mixed signal types, including scalars, vectors, and matrices.
- Simplifies hierarchical model design with structured signals.
- Improves model readability and modularity.
- Commonly used in complex systems requiring grouped signals.
e. Bus Selector

- Extracts specific signals from a bus.
- Allows selection of named signals for processing.
- Essential for managing large systems with multiple subsystems.
- Complements the Bus Creator for efficient signal routing.
- Simplifies debugging by isolating relevant signals.
06. Control Flow
a. If
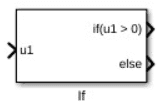
- Executes conditional logic based on specified conditions.
- Outputs control signals to other blocks based on true/false evaluations.
- Essential for decision-making in models.
- Supports multiple conditions for complex logic.
- Common in state machines and event-driven systems.
b. If-Action Subsystem
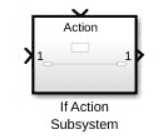
- Executes a specific subsystem based on a condition from an If block.
- Reduces the need for multiple independent subsystems.
- Improves efficiency by activating only relevant parts of the model.
- Supports modular design for conditional processes.
- Used in fault handling and event-driven operations.
c. For Iterator Subsystem

- Implements a loop within a subsystem for repetitive execution.
- Executes a block or series of blocks for a specified number of iterations.
- Useful for iterative computations like summations or algorithms.
- Configurable for variable or fixed iteration counts.
- Common in data processing and optimization tasks.
07. Continuous and Discrete Systems
a. Integrator
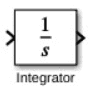
- Performs continuous integration of the input signal.
- Outputs the accumulated value over time.
- Used for modeling systems like velocity from acceleration.
- Supports initial conditions for accurate simulation.
- Common in control systems and dynamic models.
b. Discrete-Time Integrator
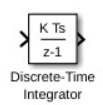
- Computes discrete integration for sampled signals.
- Outputs accumulated value at specified time steps.
- Ideal for digital control systems and sampled data analysis.
- Allows customization of sample time and initial value.
- Used in discrete-time PID controllers and filters.
c. Transfer Function
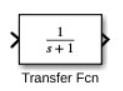
- Represents a system in the Laplace or z-domain.
- Models dynamics using numerator and denominator coefficients.
- Supports both continuous and discrete-time systems.
- Ideal for linear systems and control design.
- Commonly used in system identification and tuning.
d. State-Space
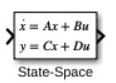
- Models a system using state-space representation (A, B, C, D matrices).
- Provides a compact and versatile way to simulate dynamics.
- Supports multi-input, multi-output (MIMO) systems.
- Used for advanced control and observer design.
- Ideal for representing high-order or coupled systems.
e. PID Controller
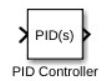
- Implements Proportional-Integral-Derivative control logic.
- Provides precise control over system dynamics.
- Supports real-time tuning of gains (P, I, D).
- Essential in automation, robotics, and dynamic systems.
- Configurable for continuous or discrete control systems.
08. Signal Processing
a. FFT

- Computes the Fast Fourier Transform for frequency-domain analysis.
- Converts time-domain signals into frequency components.
- Useful for analyzing signal spectra and harmonics.
- Ideal for vibration, audio, and RF analysis.
- Supports real-time and batch processing.
b. Filter
- Applies low-pass, high-pass, band-pass, or custom filters.
- Removes noise or unwanted components from signals.
- Configurable for continuous or discrete systems.
- Essential in signal processing and communication systems.
- Used in audio, biomedical, and sensor signal conditioning.
This was about “Basic MATLAB Simulink Blocks“. Thank you for reading.
Also, read:
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 1000+ Automotive Interview Questions With Answers
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway
- 8 Reasons Why EVs Can’t Fully Replace ICE Vehicles in India
- A Complete Guide To FlexRay Automotive Protocol
- Adaptive AUTOSAR Vs Classic AUTOSAR: Which One For Future Vehicles?