Hello guys, welcome back to our blog. In this article, I will discuss the core software layers in software-defined vehicles and the use cases of each layer.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Software-defined Vehicle Architecture: Part 02
- Introduction To Software Defined Vehicle (SDV): Part 01
- Difference Between A MEX and M Script File in MATLAB: A Complete Guide
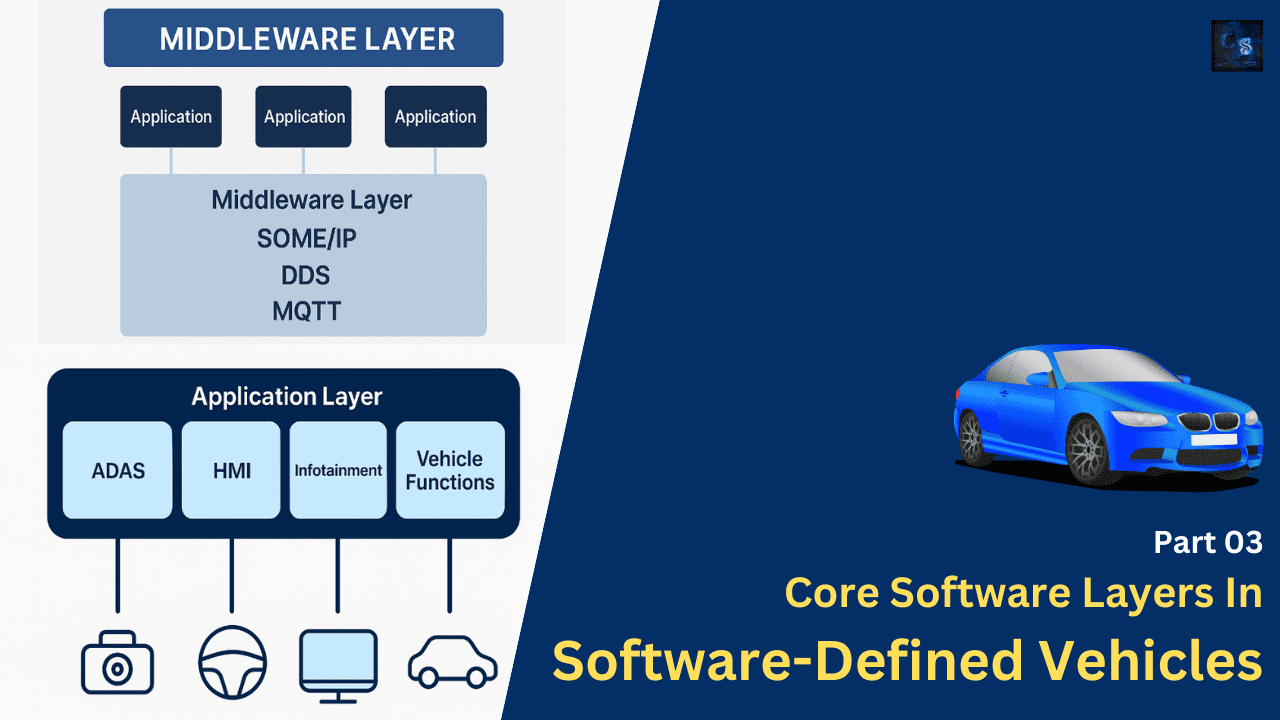
Core Software Layers In Software-Defined Vehicles
The Software Defined Vehicle (SDV) paradigm revolutionizes how vehicles are engineered, shifting emphasis from hardware-centric design to software-driven functionality. At the heart of this transformation lies a layered software architecture that divides functionality across specific strata to enhance modularity, upgradability, and system-wide integration.
These core layers work in tandem—from high-level applications like ADAS and infotainment, down to middleware protocols ensuring reliable communication, and the foundational base software (BSW) that interacts with hardware. This multilayered structure allows automakers and suppliers to decouple software from hardware, making it easier to innovate, maintain, and scale across vehicle platforms.
Moreover, with increasing demand for over-the-air (OTA) updates, data-driven services, and cloud connectivity, these software layers must support secure, deterministic performance while being flexible enough to accommodate emerging technologies like AI, V2X, and edge computing.
In this section, we’ll break down the core layers—Application Layer, Middleware Layer, BSW with Adaptive AUTOSAR, and Cloud & Edge Integration—each with examples and practical relevance in modern vehicles.
? Application Layer (ADAS, HMI, Infotainment, etc.)
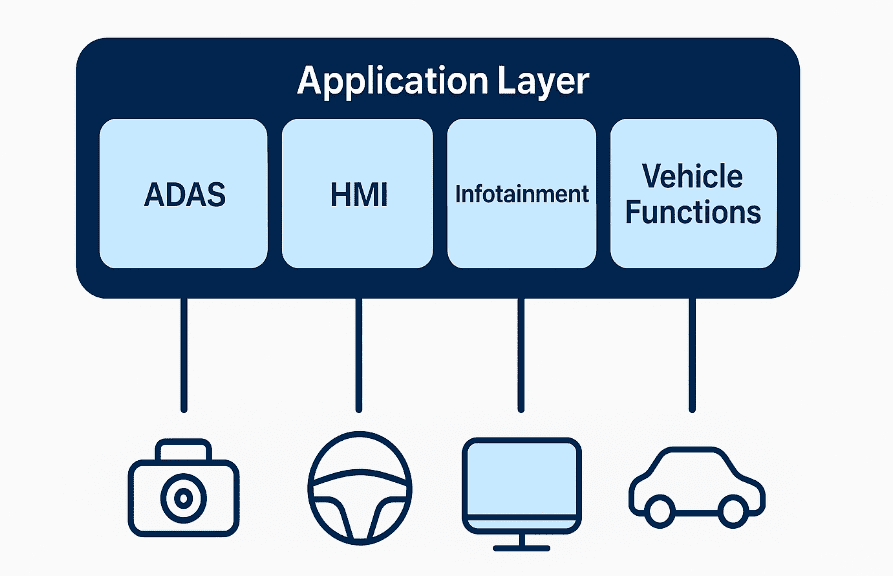
The application layer forms the topmost layer in the SDV software architecture. This is where vehicle functionality directly interacts with the driver and the environment. Key components of this layer include:
- Advanced Driver Assistance Systems (ADAS): These applications process sensor inputs (camera, radar, LiDAR) to support safety-critical features like adaptive cruise control, automatic emergency braking, and lane keeping.
- Human Machine Interface (HMI): HMIs are responsible for rendering intuitive interactions between users and the vehicle system, such as digital dashboards, voice assistants, or touchscreen infotainment systems.
- Infotainment Systems: These applications manage media playback, navigation, smartphone integration (Apple CarPlay, Android Auto), and connectivity services (e.g., Spotify, Alexa, etc.).
- Vehicle Functions: Examples include climate control, lighting systems, seat management, and personalized driver profiles.
In modern SDVs, these applications are containerized, often developed using high-level languages (e.g., C++, Python, Java) and run on high-performance compute platforms, isolated from safety-critical systems using hypervisors or sandboxing mechanisms.
? Middleware Layer (SOME/IP, DDS, MQTT)
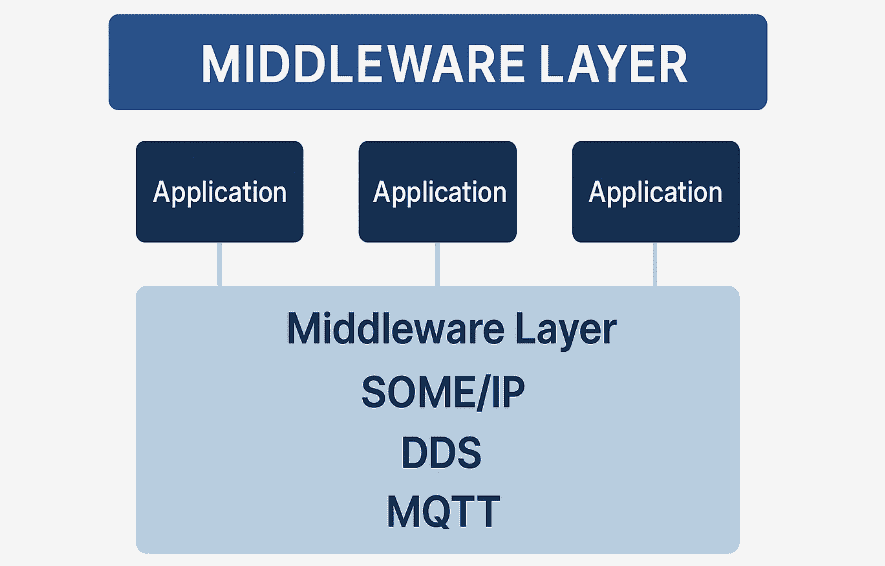
The middleware layer serves as the glue that binds application logic with the underlying operating system and base software. It enables abstraction, data management, service discovery, and real-time communication.
- SOME/IP (Scalable service-Oriented MiddlewarE over IP): Predominantly used in automotive systems for inter-process communication and service discovery, SOME/IP supports a service-oriented architecture that aligns with Ethernet-based SDVs.
- DDS (Data Distribution Service): Often used in autonomous systems due to its real-time and publish-subscribe communication model. DDS allows decoupled data exchange, which is crucial in scenarios like V2X and real-time sensor data fusion.
- MQTT (Message Queuing Telemetry Transport): A lightweight messaging protocol, MQTT is typically used for cloud communication and edge-to-cloud telemetry in connected cars.
Middleware platforms such as eCAL, ROS 2, or proprietary stacks by OEMs build on these protocols to ensure scalable communication between ECUs, applications, and the cloud.
⚙️ BSW, Adaptive AUTOSAR, and Hypervisors
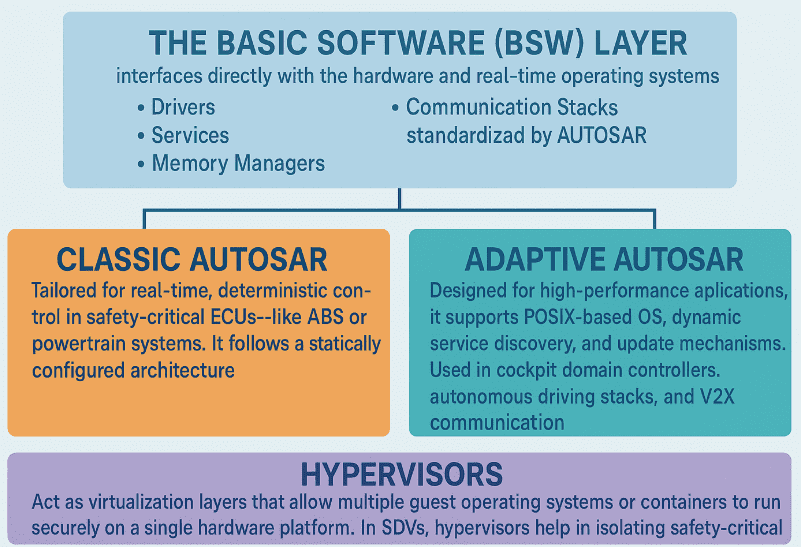
The Basic Software (BSW) layer interfaces directly with the hardware and real-time operating systems. It comprises drivers, services, memory managers, and communication stacks standardized by AUTOSAR (Automotive Open System Architecture).
- Classic AUTOSAR: Tailored for real-time, deterministic control in safety-critical ECUs—like ABS or powertrain systems. It follows a statically configured architecture.
- Adaptive AUTOSAR: Designed for high-performance applications, it supports POSIX-based OS, dynamic service discovery, and update mechanisms. Used in cockpit domain controllers, autonomous driving stacks, and V2X communication.
- Hypervisors: Act as virtualization layers that allow multiple guest operating systems or containers to run securely on a single hardware platform. In SDVs, hypervisors help in isolating safety-critical and non-safety applications.
This layer ensures abstraction of hardware differences, reusability of software modules across platforms, and compliance with safety standards like ISO 26262.
☁️ Cloud & Edge Integration
SDVs are inherently connected platforms, and the cloud-edge continuum plays a vital role in managing data, intelligence, and updates:
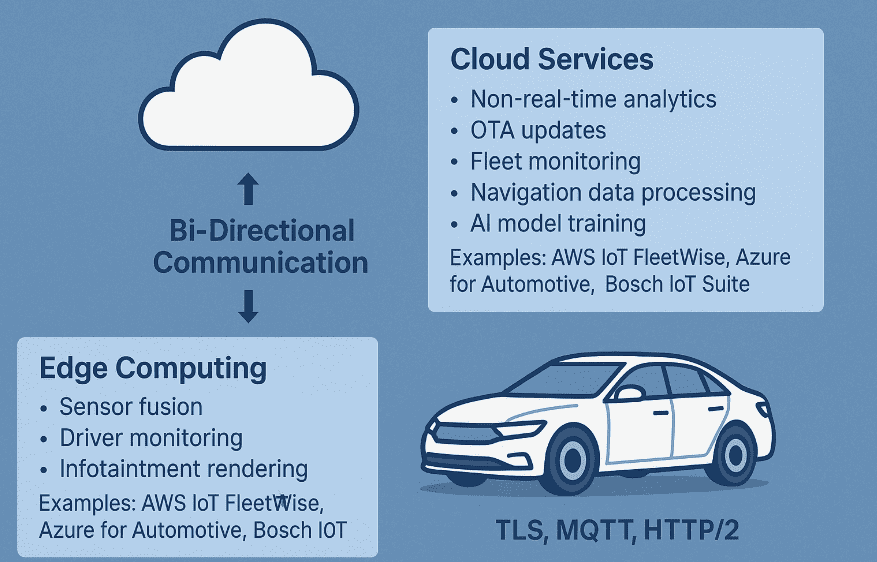
- Edge Computing: In-vehicle edge units handle real-time processing tasks like sensor fusion, driver monitoring, and infotainment rendering. These systems ensure low-latency responses without needing to depend on the cloud.
- Cloud Services: Handle non-real-time analytics, OTA updates, fleet monitoring, navigation data processing, and AI model training. Examples include AWS IoT FleetWise, Azure for Automotive, and Bosch IoT Suite.
- Bi-Directional Communication: Secure communication protocols (TLS, MQTT, HTTP/2) allow seamless data flow for diagnostics, telemetry, and software update management.
Cloud-edge integration ensures that vehicles remain up-to-date, data-driven, and part of the larger mobility ecosystem without compromising performance or safety.
? Conclusion: Core Software Layers in SDVs – The Digital Nervous System
The core software layers in SDVs form the digital nervous system of modern vehicles. These layers are not just technical components—they are the foundation enabling the intelligence, adaptability, and connectivity of today’s automotive platforms.
At the Application Layer, critical services like ADAS, HMI, and infotainment come to life, offering real-time decisions and interactive experiences to both drivers and passengers. This is the face of the vehicle’s intelligence—customizable, dynamic, and constantly evolving.
Moving deeper, the Middleware Layer plays a vital role in ensuring that applications communicate efficiently and securely with the underlying hardware. Protocols like SOME/IP, DDS, and MQTT ensure seamless interoperability, service discovery, and data flow between various vehicle systems.
At the base lies the Basic Software (BSW) layer, supported by platforms like Adaptive AUTOSAR and hypervisors, which manage system safety, scheduling, and isolation of multiple operating environments. These components ensure that even the most safety-critical systems operate without interference, while also supporting real-time processing and secure partitioning.
Finally, the integration of Cloud and Edge Computing extends the vehicle’s intelligence beyond its physical boundaries. Features like remote diagnostics, OTA updates, and AI model deployment on the edge allow for smarter, more responsive systems that learn and improve over time.
Together, these layers don’t just support the vehicle—they define its character, functionality, and potential for innovation. As SDVs evolve, mastering the architecture and integration of these software layers will be key to building safe, scalable, and future-ready vehicles.
This was about “Core Software Layers In Software Defined Vehicles“. Thank you for reading.
Also, read:
- “Mother of All Deals”: How The EU–India Free Trade Agreement Can Reshape India’s Economic Future
- 10 Free ADAS Projects With Source Code And Documentation – Learn & Build Today
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 1000+ Automotive Interview Questions With Answers
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 2026 Hackathons That Can Change Your Tech Career Forever
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway