Hello guys, welcome back to our blog. Here in this article, we will discuss the difference between CAN and CAN TP (Transfer Protocol), what is the importance of CAN TP, and the benefits of using over CAN.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
Also, read:
- Advanced Technologies In-Vehicle Infotainment Systems
- Connected Cars: The Future Of Smart Mobility
- Difference Between OBD And UDS Protocol In Automotive
Difference Between CAN And CAN TP (Transfer Protocol)
Controller Area Network (CAN) is a robust communication protocol widely used in automotive and industrial applications to enable real-time communication between electronic control units (ECUs). Designed for efficiency and reliability, CAN allows multiple microcontrollers, sensors, and devices within a vehicle or machine to exchange small packets of data without needing a central computer. The CAN protocol’s simplicity and error-checking mechanisms make it ideal for transmitting short, frequent messages that control critical functions such as braking, engine operation, and transmission control.
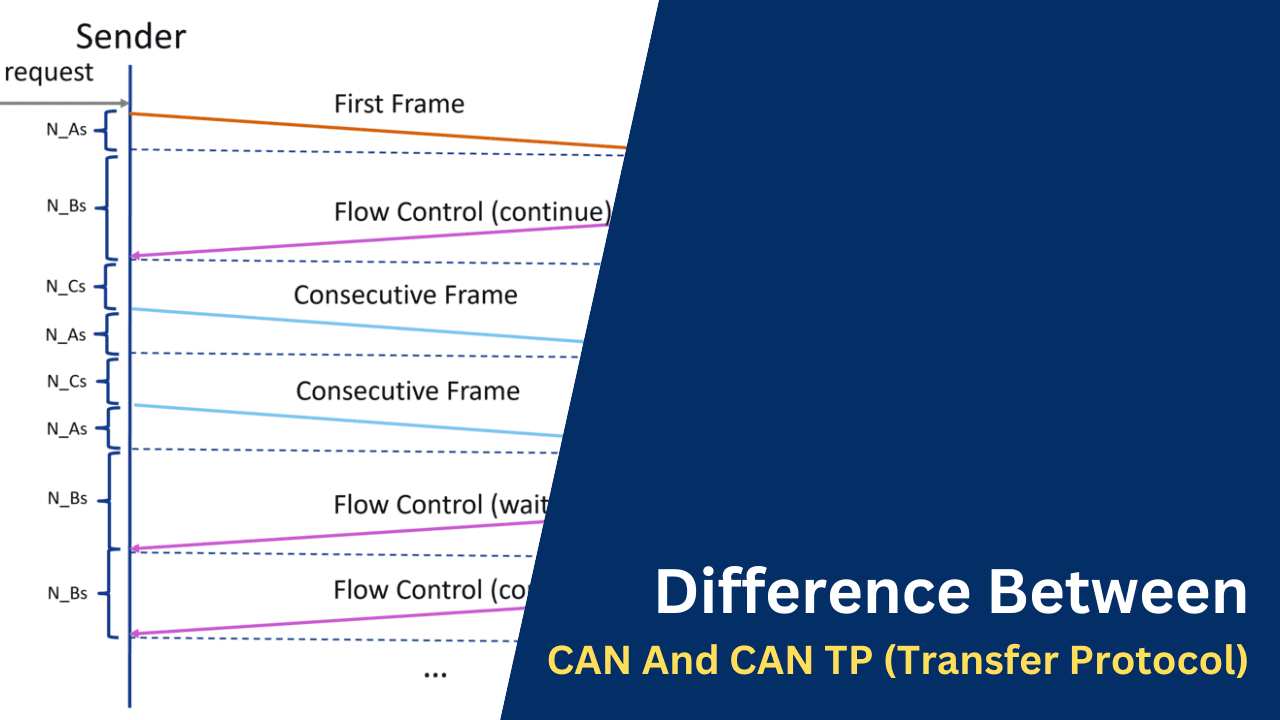
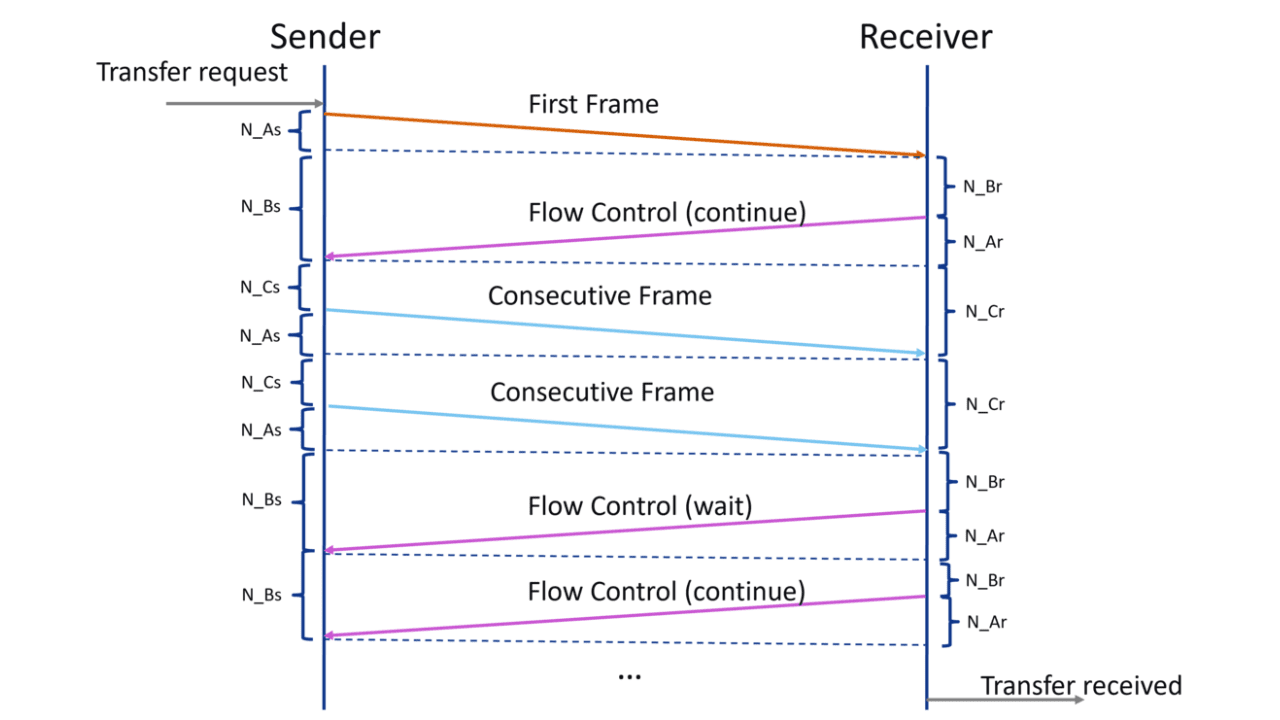
CAN Transport Protocol (CAN TP) is an extension of CAN, enabling the transmission of larger data packets over the CAN network. Standard CAN frames are limited to 8 bytes, which can be restrictive for tasks requiring extensive data, such as diagnostics or software updates in ECUs. CAN TP address this by segmenting larger messages into multiple CAN frames and reassembling them at the destination. It is essential for applications like Unified Diagnostic Services (UDS), where larger, reliable data exchanges are required. This transport protocol layer effectively expands CAN’s capabilities, allowing more complex interactions while maintaining CAN’s reliable communication foundation.
01. Basic Definition
CAN (Controller Area Network): A communication protocol widely used in vehicles to allow microcontrollers and devices to communicate with each other without a host computer. CAN is primarily designed for reliable, real-time communication within vehicles.
CAN TP (Transport Protocol): An extension of the CAN protocol, used to transmit larger data packets over the CAN bus by breaking them into smaller frames. This is because CAN frames are limited in size (typically 8 bytes), so CAN TP allows for the transmission of messages larger than 8 bytes.
02. Primary Purpose
CAN: Facilitates efficient and reliable communication between nodes on a network, where each node is generally a small device, sensor, or actuator in automotive electronics.
CAN TP: Specifically designed to enable the sending of data larger than 8 bytes over the CAN network, which is necessary for diagnostic and communication protocols like UDS (Unified Diagnostic Services).
03. Data Transmission Size
CAN: Limited to a maximum payload of 8 bytes per CAN frame.
CAN TP: Can handle much larger data by segmenting and reassembling data packets, making it possible to transmit information larger than 8 bytes.
04. Layer in Communication Model
CAN: Operates at the Data Link Layer in the OSI model.
CAN TP: Functions as a Transport Layer protocol on top of CAN, specifically enabling communication that exceeds CAN’s 8-byte frame limit.
05. Common Use Cases
CAN: Used for real-time control applications where small, frequent messages are exchanged, such as in-vehicle control systems, engine management, and transmission control.
CAN TP: Commonly used in diagnostic and programming applications where larger data exchanges are required, such as flashing ECUs, diagnostics, and parameter settings.
06. Protocol Overhead
CAN: Has low overhead and a simple frame structure, making it suitable for high-speed communication with minimal delays.
CAN TP: Adds overhead for segmentation and reassembly, which introduces slight delays but is essential for managing larger data transmissions.
Conclusion:
In conclusion, both CAN and CAN TP play critical roles in automotive and industrial communication networks, each serving distinct purposes. CAN provides a robust and efficient framework for fast, reliable exchange of short messages between devices, making it ideal for real-time control applications. In contrast, CAN TP extends CAN’s capabilities by enabling the transmission of larger data packets, essential for diagnostics, programming, and complex data exchanges.
Together, these protocols offer a versatile communication solution that meets the demands of both simple control tasks and more data-intensive operations, supporting the complex and interconnected systems found in modern vehicles and industrial equipment.
This was about the “Difference Between CAN And CAN TP (Transfer Protocol)“. Thank you for reading.
Also, read:
- 10 Free ADAS Projects With Source Code And Documentation – Learn & Build Today
- 100 + Electrical Engineering Projects For Students, Engineers
- 100+ Indian Startups & What They Are Building
- 1000+ Automotive Interview Questions With Answers
- 1000+ Electronics Projects For Engineers, Diploma, MTech Students
- 1000+ MATLAB Simulink Projects For MTech, Engineering Students
- 2026 Hackathons That Can Change Your Tech Career Forever
- 50 Advanced Level Interview Questions On CAPL Scripting