Hello guys, welcome back to my blog. In this article, I will discuss software-defined vehicle architecture, the difference between domain and zonal architecture, the SDV operating system, and in-vehicle communications.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Introduction To Software Defined Vehicle (SDV): Part 01
- Difference Between A MEX and M Script File in MATLAB: A Complete Guide
- Leading Brands In Automotive Microcontrollers
Software-defined Vehicle Architecture
The automotive industry is undergoing a seismic shift, transitioning from traditional mechanical and electrical systems toward software-driven ecosystems. This transformation is giving rise to the concept of Software Defined Vehicles (SDVs), where software takes precedence over hardware in determining vehicle functionality, user experience, and value creation. Central to the SDV concept is the architectural redesign of vehicle systems to accommodate dynamic software features, continuous updates, and scalable compute platforms.
Historically, vehicles were engineered with tightly coupled electronic control units (ECUs) dedicated to specific functions such as braking, engine control, or air conditioning. However, this siloed approach presented scalability challenges, hindered over-the-air (OTA) updates, and restricted cross-domain innovation. The need for increased computing performance, real-time data processing, and intelligent connectivity has catalyzed the evolution toward centralized and modular vehicle architectures.
Modern SDVs embrace zonal and centralized architectures that support cross-functional collaboration and improve lifecycle management of software assets. With centralized high-performance computers (HPCs), the vehicle becomes a platform capable of hosting complex software stacks and artificial intelligence-driven applications. The focus shifts from hardware-centric design to a cloud-connected, service-oriented architecture.
This chapter delves deep into the core components of SDV architecture, highlighting the evolution from domain to zonal architectures, the emergence of centralized compute platforms, the critical role of real-time operating systems, and the necessity of high-speed, deterministic in-vehicle communication protocols. Understanding this architecture is vital for engineers, developers, and business strategists shaping the future of mobility.
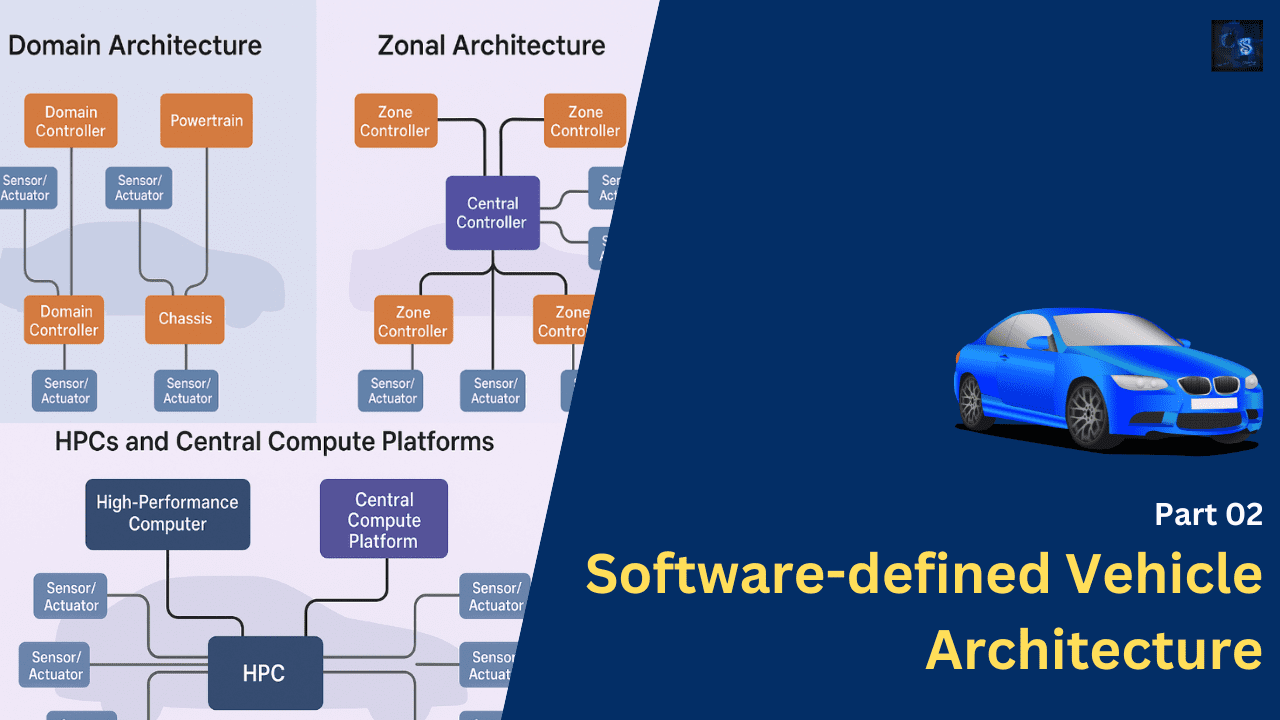
Domain vs Zonal Architectures
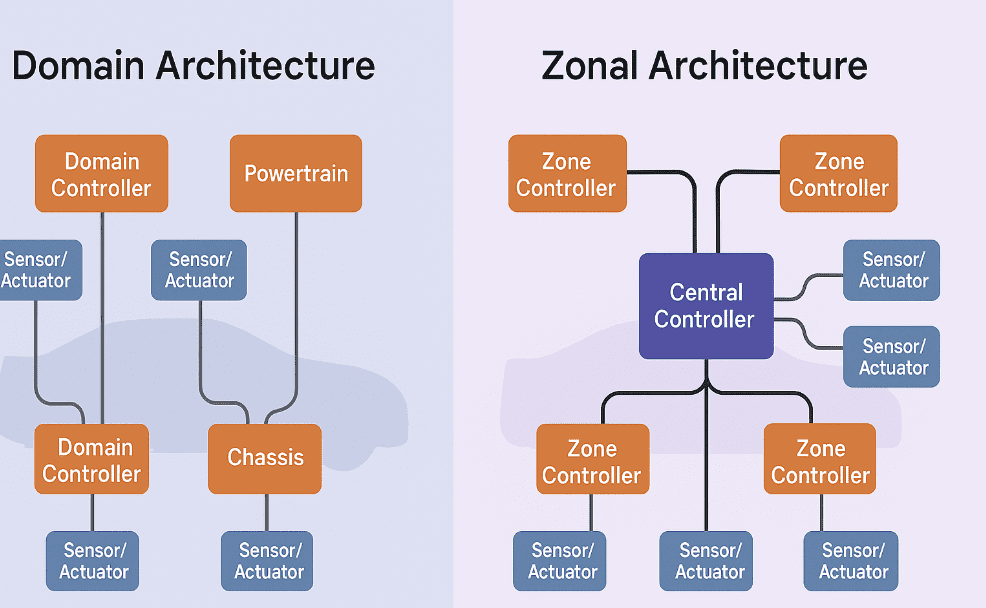
Domain Architecture:
Domain architecture is a modular and logical approach to organizing vehicle control units based on functional domains. These domains often include:
- Powertrain
- Chassis & Safety
- Body & Comfort
- Infotainment
- Advanced Driver-Assistance Systems (ADAS)
Each domain is typically governed by a powerful domain controller, which aggregates signals and data from several ECUs under its functional scope.
Domain architectures were a step forward from decentralized ECUs, allowing better software management and functional optimization. For instance, all ADAS-related ECUs and sensors would connect to a single domain controller, ensuring better integration and functionality like lane keeping and adaptive cruise control.
Advantages:
- Easier to scale software features within a domain
- Better management of domain-specific processing
- Functional clustering enables focused development
Disadvantages:
- High complexity in wiring due to the physical separation of sensors and actuators
- Increased cost and weight from long harnesses
- Latency due to cross-domain communication
Zonal Architecture:
Zonal architecture organizes the vehicle electronics based on physical location rather than functionality. Each vehicle zone (e.g., front-left, rear-right) has its own zonal controller which aggregates all local sensors and actuators and communicates with a central compute platform.
This architecture helps reduce wiring length, simplify harness complexity, and improve modularity in design. For example, instead of running wires from rear sensors to a domain controller in the front, the zonal controller processes data locally and transmits relevant information to the HPC.
Advantages:
- Dramatically reduced wiring harness length and weight
- Simplified assembly and maintenance
- Higher scalability and flexibility
Disadvantages:
- Requires highly capable zonal controllers
- Increased software complexity to manage distributed physical zones
Transition:
OEMs like Volkswagen, GM, and Mercedes-Benz are moving toward zonal architectures for new-generation electric and SDVs. The transition supports vehicle scalability, modularity, and high-bandwidth communication required for features like autonomous driving.
HPCs and Central Compute Platforms
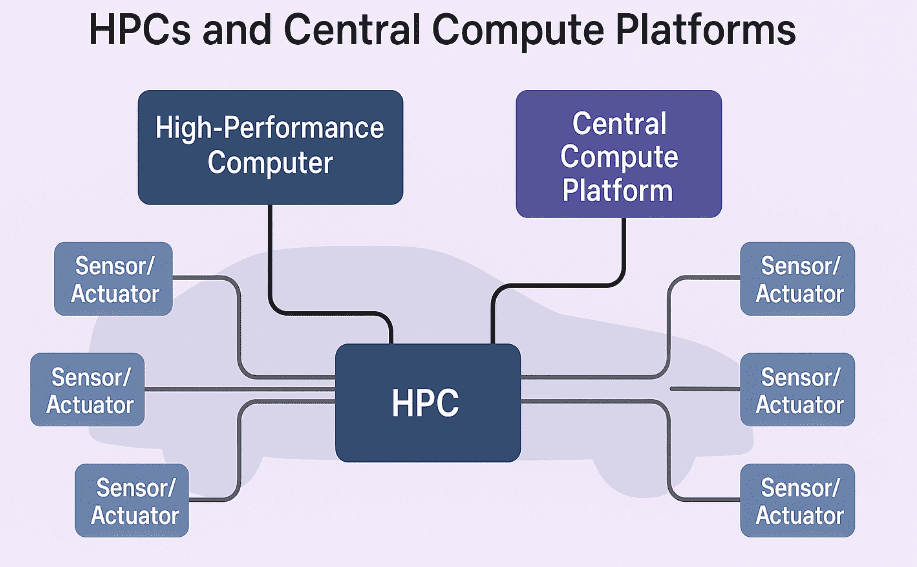
High-Performance Computers (HPCs):
HPCs in SDVs replace multiple independent ECUs by centralizing computing power for entire vehicle domains or even the entire vehicle. These powerful units often integrate CPUs, GPUs, TPUs, and even AI accelerators.
The purpose of HPCs is to serve as software execution platforms capable of handling tasks such as sensor fusion, real-time perception, decision-making, and AI/ML algorithms. HPCs also enable over-the-air updates and continuous software deployment, offering an experience closer to smartphones and cloud-connected devices.
Role in SDV:
- Consolidation of ADAS, infotainment, powertrain, and body control tasks
- Enables advanced functions like sensor fusion, real-time data analytics, and decision-making
- Facilitates feature updates and software modularity
Benefits:
- Fewer physical components and reduced cost
- Unified software stack simplifies development
- Hardware abstraction layers enhance software portability
Central Compute Platforms:
These platforms act as the vehicle’s brain. Instead of numerous isolated ECUs, SDVs use a central compute unit interfacing with zonal controllers to process:
- Sensor data (LIDAR, radar, cameras)
- Driver input
- Cloud and edge data
- Actuator commands
Central platforms run multiple operating systems and virtual machines, separating safety-critical and non-safety tasks. This virtualization approach is key for security, resource allocation, and concurrent execution of various vehicle services.
Examples:
- NVIDIA DRIVE Orin & Thor platforms
- Qualcomm Snapdragon Ride
- Tesla’s Full Self-Driving (FSD) Computer
- NXP BlueBox for ADAS
Challenges:
- Thermal management of high-performance chips
- Fault tolerance and redundancy
- Software integration across layers and vendors
Central compute architectures lay the groundwork for autonomous driving and data-driven vehicle ecosystems.
Vehicle Operating Systems (Linux, QNX, Adaptive AUTOSAR)
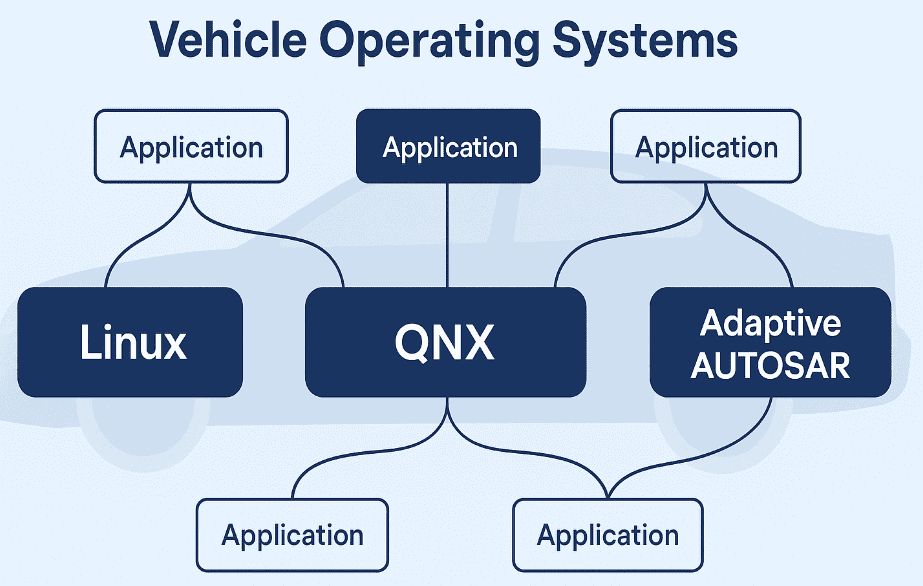
A modern SDV requires a sophisticated operating system (OS) to manage real-time tasks, virtualization, secure communications, and updates. Let’s explore the major types:
- Linux-based OS (e.g., Android Automotive, AGL):
Linux-based systems are ideal for non-critical systems such as infotainment, navigation, and digital instrument clusters. They offer flexibility, community support, and fast development cycles. Android Automotive, for example, is becoming popular in SDVs due to seamless app integration and OTA capabilities.
Examples: Google Android Automotive OS (Volvo, Polestar), AGL (Toyota, Mazda)
Pros:
- Rapid innovation and ecosystem integration
- Mature tools and libraries
- Easy integration with consumer apps
Cons:
- Not suitable for real-time safety-critical applications
- Security hardening required
- QNX (BlackBerry QNX):
QNX is a real-time operating system (RTOS) designed for embedded and safety-critical environments. It ensures predictable execution times, reliability, and robust fault handling, making it suitable for domains like ADAS and powertrain.
Pros:
- High reliability and fault tolerance
- Proven track record in ADAS and automotive safety systems
- Real-time deterministic performance
Cons:
- Closed source and license-dependent
- Limited third-party integration compared to Linux
- Adaptive AUTOSAR:
AUTOSAR (Automotive Open System Architecture) evolved from its Classic version to Adaptive AUTOSAR to address the dynamic needs of SDVs. It enables dynamic deployment of applications, service-oriented communication, and seamless integration with cloud and edge systems.
Key Features:
- Modular and scalable architecture
- Ideal for HPCs, cloud connectivity, and advanced diagnostics
- Designed for both safety and flexibility
Deployment Areas:
- ADAS, autonomous systems, V2X, and cloud integration
In practice, many SDVs run multiple OS layers—QNX or AUTOSAR for safety domains, Linux or Android for infotainment—to balance safety and flexibility.
In-Vehicle Communication (CAN, LIN, Ethernet, FlexRay)
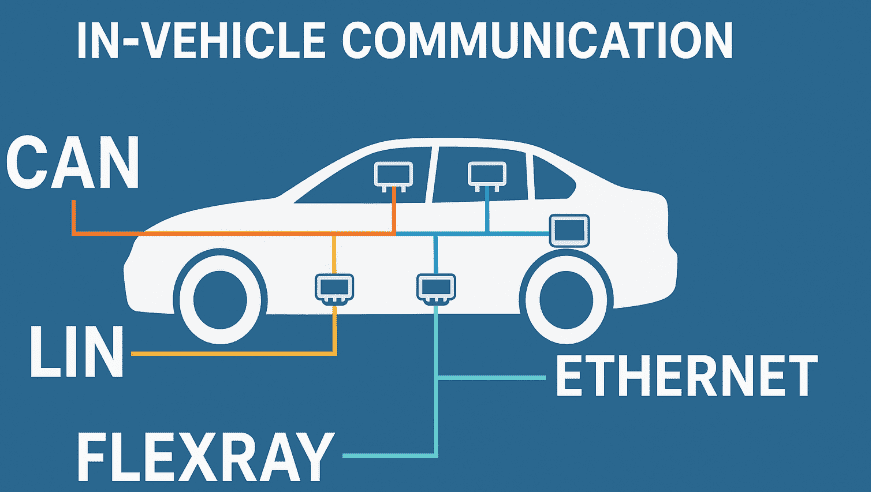
Efficient in-vehicle communication is the backbone of SDV functionality. Let’s break down the most common protocols:
- Controller Area Network (CAN):
Use: Widely used for powertrain, chassis, and safety-critical communications
Speed: Up to 1 Mbps (CAN-FD up to 5 Mbps)
Features:
- Robust and reliable
- Event-triggered communication
- Ideal for deterministic control
- Local Interconnect Network (LIN):
Use: Low-speed applications like mirror adjustment, seat control
Speed: Up to 20 kbps
Features:
- Low-cost, single master-multiple slave topology
- Less bandwidth, but sufficient for comfort applications
- FlexRay:
Use: Used in time-critical systems like steering and braking
Speed: 10 Mbps
Features:
- Deterministic, fault-tolerant
- Dual-channel architecture for redundancy
- Being phased out in favor of Ethernet in modern SDVs
- Automotive Ethernet:
Use: Backbone of modern SDVs; connects sensors, zonal controllers, and HPCs
Speed: 100 Mbps to 10 Gbps
Features:
- High bandwidth for video and sensor fusion
- Scalable and IP-based
- Supports Audio Video Bridging (AVB) and Time Sensitive Networking (TSN)
Protocol Comparison:
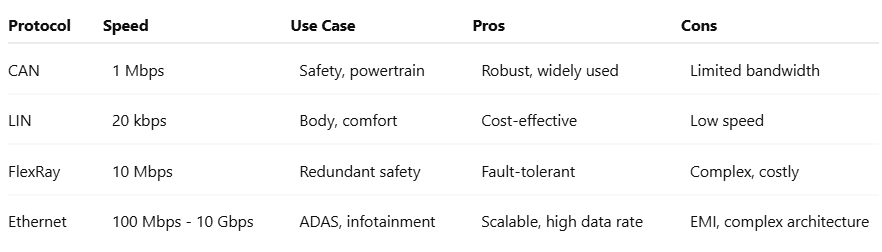
Future Outlook:
With ADAS, autonomous driving, and infotainment requiring huge data bandwidths, Ethernet is quickly becoming the default choice for SDV communication backbones. Advanced protocols like TSN ensure real-time delivery of safety-critical messages, fulfilling the strict latency and determinism requirements of autonomous systems.
Final Note:
The SDV architecture is a rapidly evolving ecosystem where compute power, software platforms, and communication technologies converge. Understanding how domain/zonal topologies integrate with central compute platforms and robust operating systems is crucial for designing future-ready vehicles. The next generation of mobility depends on how efficiently these architectural components work together to deliver safety, performance, and user delight.
This was about “Software-defined Vehicle Architecture“. Thank you for reading.
Also, read:
- FlexRay Protocol – Deep Visual Technical Guide
- Top 50 AI-Based Projects for Electronics Engineers
- UDS (Unified Diagnostic Services) — Deep Visual Technical Guide
- Automotive Ethernet — Deep Visual Technical Guide
- Controller Area Network (CAN) — Deep Visual Technical Guide
- Top 30 High-Paying Embedded Tools You Must Learn in 2026
- Automotive Resource For Free On GitHub
- When Technology Fails: How a Trapped EV Crash Changed Car Safety in China