

Top 100 CAN, CAN-FD, CAN-TP Interview Questions With Answers
Hello guys, welcome back to our blog. In this article, I will discuss the top 100 CAN, CAN-FD, CAN-TP interview questions with answers.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Revolutionizing EV Safety: China Rolls Out GB38031-2025 Battery Standard
- Electronic Control Unit, ECU Flashing Process
- Guide On Writing Testcases For HiL Testing
CAN, CAN-FD, CAN-TP Interview Questions
01. CAN (Controller Area Network)
Purpose: Standard communication protocol used in automotive systems.
Key Features:
- Data Rate: Up to 1 Mbps
- Max Payload/Data per Frame: 8 bytes
- Arbitration: CSMA/CR (Carrier Sense Multiple Access with Collision Resolution)
- Error Handling: Built-in with CRC and retransmission
- Use Case: Sending small, real-time messages like sensor data, switch states, etc.
02. CAN FD (Flexible Data Rate)
Purpose: An enhanced version of standard CAN for higher performance.
Key Features:
- Data Rate: Up to 8 Mbps (data phase), arbitration phase still ~1 Mbps
- Max Payload: Up to 64 bytes per frame
- Efficiency: Reduced protocol overhead per byte
- Backward Compatibility: Compatible with standard CAN controllers (with limitations)
- Use Case: Suitable for high-bandwidth applications like ADAS, ECU firmware updates, and diagnostics.
03. CAN TP (Transport Protocol)
Purpose: A higher-layer protocol (ISO 15765-2) used on top of CAN to transfer large data packets.
Key Features:
- Data Segmentation: Splits large messages (>8 bytes) into multiple CAN frames
- Reassembly: Receives and reassembles at the target ECU
- Flow Control: Uses flow control frames to manage transmission
- Used In: UDS (Unified Diagnostic Services), ECU flashing, diagnostics, etc.
- Works With: Both CAN and CAN FD
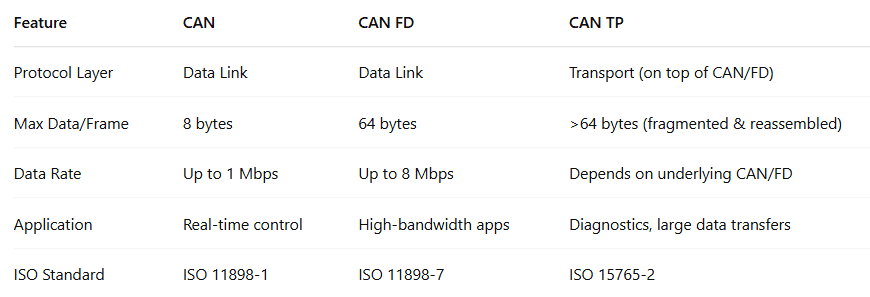
04. Comparison Table
CAN, CAN-FD, CAN-TP Interview Questions
Basic Level Questions
01. What is CAN?
Answer. CAN (Controller Area Network) is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate without a host computer.
02. What is the maximum data payload of a standard CAN frame?
Answer. 8 bytes.
03. What is CAN FD?
Answer. CAN FD (Flexible Data-rate) is an extension of the CAN protocol that allows for higher data rates and larger payloads (up to 64 bytes).
04. What is the use of CAN TP?
Answer. CAN TP (Transport Protocol) is used to send larger data payloads (more than 8 bytes) by segmenting them into multiple CAN or CAN FD frames.
05. Which ISO standard defines CAN?
Answer. ISO 11898.
06. Which ISO standard defines CAN TP?
Answer. ISO 15765-2.
07. How does CAN handle message collision?
Answer. Through arbitration using CSMA/CR.
08. Can CAN FD be used on the same physical layer as CAN?
Answer. Yes, but only CAN FD-capable nodes can interpret CAN FD frames.
09. What is the main benefit of CAN FD over CAN?
Answer. Higher data rate and larger payload capacity.
10. What are the two main phases of a CAN FD frame?
Answer. Arbitration phase and data phase.
11. How many bytes can a CAN FD frame carry?
Answer. Up to 64 bytes.
12. What does CSMA/CR stand for?
Answer. Carrier Sense Multiple Access with Collision Resolution.
13. Why is CAN TP needed?
Answer. Because CAN and CAN FD cannot natively transmit data larger than their frame payload size.
14. What is a flow control frame in CAN TP?
Answer. It is used by the receiver to control the transmission rate of segmented messages.
15. Is CAN a connection-oriented protocol?
Answer. No, it is connectionless and broadcast-based.
16. Which type of communication is CAN best suited for?
Answer. Real-time, small data packet communication.
17. What does the FD in CAN FD stand for?
Answer. Flexible Data-rate.
18. Can standard CAN nodes understand CAN FD frames?
Answer. No, they will ignore CAN FD frames.
19. What is the significance of the IDE bit in CAN frames?
Answer. It distinguishes between standard and extended identifiers.
20. What is a CAN identifier?
Answer. A unique ID used for message arbitration and prioritization.
Intermediate Level Questions
21. What is the maximum bitrate of CAN FD?
Answer. Up to 8 Mbps in the data phase.
22. What is the difference between a standard and extended CAN ID?
Answer. Standard ID is 11 bits; extended ID is 29 bits.
23. What is bit stuffing in CAN?
Answer. Inserting a complementary bit after five consecutive bits of the same polarity to maintain synchronization.
24. What is a First Frame (FF) in CAN TP?
Answer. It indicates the start of a multi-frame message and carries part of the data.
25. What is a Consecutive Frame (CF) in CAN TP?
Answer. It follows the first frame and continues the message payload.
26. What is a Single Frame (SF) in CAN TP?
Answer. It contains a complete message if the payload fits within one frame.
27. What is the DLC in CAN/CAN FD?
Answer. Data Length Code, indicating how many bytes of data are in the frame.
28. What is the CRC in CAN used for?
Answer. Cyclic Redundancy Check for error detection.
29. What is the role of the CAN controller?
Answer. To format, transmit, and receive CAN frames.
30. What is the use of ACK slot in CAN frame?
Answer. It allows receivers to acknowledge successful reception of a frame.
31. How many nodes can be connected on a single CAN bus?
Answer. Up to 112 theoretically, but practically fewer due to loading and speed constraints.
32. What is the inter-frame spacing in CAN?
Answer. The mandatory idle time between two frames.
33. What is the maximum size of a message in CAN TP?
Answer. Up to 4095 bytes (as per ISO 15765-2).
34. What is a STmin in CAN TP?
Answer. Minimum separation time between consecutive frames.
35. How does CAN TP handle flow control?
Answer. Using FC (Flow Control) frames to control pacing.
36. Can CAN TP work with CAN FD?
Answer. Yes, with larger payloads and faster transmission.
37. Is CAN deterministic?
Answer. Yes, message priority determines access to the bus.
38. What is the major difference between CAN and CAN FD CRCs?
Answer. CAN uses a 15-bit CRC; CAN FD uses up to a 21-bit CRC for larger payloads.
39. What is an N_PDU in CAN TP?
Answer. Network Protocol Data Unit, the unit of data exchanged at the network layer.
40. What is an AE (Addressing Entity) in ISO-TP?
Answer. Identifies the communicating endpoints (source/target ECUs).
Advanced Level Questions
41. How does arbitration work in CAN?
Answer. By non-destructive bit-wise arbitration on the CAN ID field.
42. What happens when two nodes send messages with same priority?
Answer. The message with the lowest CAN ID wins arbitration.
43. What happens if a CAN frame is corrupted?
Answer. An error frame is sent, and the message is retransmitted.
44. How many types of CAN errors are there?
Answer. Five: bit error, stuff error, CRC error, form error, and acknowledgment error.
45. What is the error passive mode in CAN?
Answer. A node enters this mode after multiple errors, reducing its participation in communication.
46. What is a CAN bus-off state?
Answer. A state where a node stops transmitting due to repeated errors.
47. What is segmentation in CAN TP?
Answer. Breaking larger messages into multiple frames.
48. What is reassembly in CAN TP?
Answer. Combining received segmented frames into one large message.
49. How are messages prioritized in CAN?
Answer. Lower CAN ID means higher priority.
50. Why is timing synchronization important in CAN?
Answer. To ensure correct sampling of bits across all nodes.
51. What is the Bus Load in CAN?
Answer. Percentage of total bandwidth used.
52. What tools are used to analyze CAN messages?
Answer. CANoe, CANalyzer, PCAN-View, Vector tools, etc.
53. What is the purpose of stuff bits in CAN?
Answer. To maintain synchronization during transmission.
54. Can CAN TP handle diagnostics?
Answer. Yes, it is commonly used with UDS for diagnostics.
55. What is the impact of bit rate on the CAN network?
Answer. Higher bit rate reduces max bus length and increases EMI.
56. What are extended addressing and normal addressing in CAN TP?
Answer. Methods of identifying communication endpoints in CAN TP.
57. What is a CAN database (DBC) file?
Answer. It defines the format and signals of CAN messages.
58. Can multiple ECUs send messages with the same ID?
Answer. It’s not recommended; it may cause conflicts.
59. What is the function of termination resistors in CAN?
Answer. Prevent signal reflections; usually 120 Ohms at each end.
60. What is ISO 11898-2?
Answer. The physical and data link layer specification for CAN.
61. What are the types of frames in CAN protocol?
Answer.
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
62. What is the maximum size of data in a CAN frame?
Answer. 8 bytes in Classical CAN.
63. What is the maximum size of data in a CAN FD frame?
Answer. 64 bytes.
64. Can CAN TP be used with both CAN and CAN FD?
Answer. Yes, CAN TP (ISO 15765-2) can work over both classical CAN and CAN FD.
65. What is the main purpose of CAN TP?
Answer. To transmit messages larger than the frame size (e.g., >8 bytes for CAN or >64 bytes for CAN FD).
66. What is the function of the Flow Control Frame in CAN TP?
Answer. It controls the pacing of data flow by indicating how many frames can be sent and when.
67. What does STmin mean in CAN TP?
Answer. Separation Time Minimum – the minimum delay between consecutive frames from the sender.
68. What are the three types of CAN TP frames?
Answer.
- Single Frame
- First Frame
- Consecutive Frame
- Flow Control Frame (as a control frame)
69. When is a First Frame used in CAN TP?
Answer. When the data to be sent is larger than the max single frame size (i.e., >7 bytes for CAN).
70. What is the purpose of Consecutive Frames in CAN TP?
Answer. To continue sending the rest of the segmented message after the First Frame.
71. How does arbitration work in CAN?
Answer. Lower ID values have higher priority and win arbitration during simultaneous transmissions.
72. Is arbitration faster in CAN FD?
Answer. No, arbitration still occurs in the slower bitrate phase (same as classical CAN).
73. How are errors handled in CAN?
Answer. Through Error Frames and automatic retransmissions.
74. What are the different error types in CAN?
Answer:
- Bit error
- Stuff error
- CRC error
- Form error
- Acknowledgment error
75. Does CAN TP handle error correction?
Answer. No, CAN TP relies on the lower layer (CAN) for error detection and correction.
76. What happens if a Flow Control frame is not received?
Answer. The sender will time out, and the transmission will be aborted.
77. How does CAN TP ensure message order?
Answer. By using sequence numbers in Consecutive Frames (0 to 15 cyclically).
78. What happens if a frame is lost during CAN TP transmission?
Answer. The receiver will time out or detect a sequence number mismatch, and the session will fail.
79. Can multiple CAN TP sessions run in parallel?
Answer. Yes, if the ECUs support multiplexing with separate addressing.
80. What is the CAN FD bitrate during the arbitration phase?
Answer. Same as Classical CAN – up to 1 Mbps.
81. What is the CAN FD bitrate during the data phase?
Answer. Up to 8 Mbps or higher, depending on hardware and configuration.
82. What is “Bit Stuffing” in CAN?
Answer. Inserting a complementary bit after 5 consecutive identical bits to maintain clock sync.
83. Is bit stuffing required in CAN FD?
Answer. Yes, it is still used during the arbitration phase.
84. What’s the difference in CRC length between CAN and CAN FD?
Answer.
- CAN: 15-bit CRC
- CAN FD: 17-bit or 21-bit CRC (based on data length)
85. What is ISO-TP?
Answer. Another name for CAN TP (ISO 15765-2).
86. Can CAN TP be used for UDS communication?
Answer. Yes, UDS (ISO 14229) uses CAN TP as a transport protocol.
87. What is block size in CAN TP?
Answer. Number of Consecutive Frames the sender can transmit before needing a new Flow Control frame.
88. How is addressing done in CAN TP?
Answer. Using either Normal, Extended, or Functional addressing based on ID values and headers.
89. What’s the purpose of Functional addressing in CAN TP?
Answer. To broadcast a message to multiple ECUs (e.g., diagnostics request).
90. What is padding in CAN TP?
Answer. Adding extra bytes to maintain a fixed-length frame when the payload is smaller than 8/64 bytes.
91. What tool is commonly used to simulate CAN TP?
Answer. Vector CANoe, dSPACE ControlDesk, NI VeriStand, or custom Python tools.
92. What happens if CAN TP Flow Control frame has Block Size = 0?
Answer. It means the sender can send only one Consecutive Frame and must wait for the next FC frame.
93. Can you use CAN TP for ECU flashing?
Answer. Yes, it’s one of the main use cases.
94. What is the overhead of using CAN TP?
Answer. Increased latency and complexity due to segmentation, flow control, and reassembly.
95. What happens when the sequence number overflows in CAN TP?
Answer. Sequence number rolls over from 15 back to 0.
96. How do you identify CAN FD frames in a CAN log?
Answer. They are flagged as FD frames and often have longer data lengths (up to 64 bytes).
97. What tools can decode CAN TP messages?
Answer. Vector CANoe, Python scripts (python-can + isotp), dSPACE, or MATLAB toolboxes.
98. How is the flow control timer managed in CAN TP?
Answer. Using parameters like N_Bs, N_Cr, N_Ar, defined in ISO 15765-2.
99. What is N_PDU in CAN TP?
Answer. Network Protocol Data Unit – a single frame (SF/FF/CF/FC) used in CAN TP.
100. Can CAN TP retransmit frames if needed?
Answer. No, retransmission is handled at the CAN level, not in the CAN TP layer.
This was about “Top 100 CAN, CAN-FD, CAN-TP Interview Questions With Answers“. Thank you for reading.
Also, read:
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 1000+ Automotive Interview Questions With Answers
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway
- 8 Reasons Why EVs Can’t Fully Replace ICE Vehicles in India
- A Complete Guide To FlexRay Automotive Protocol
- Adaptive AUTOSAR Vs Classic AUTOSAR: Which One For Future Vehicles?