Hello guys, welcome back to our blog. Here in this article, I will share the top 50 advance-level MiL, SiL, PiL, HiL, DiL, ViL, interview questions, and these questions are most commonly asked in MBD interviews.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics
- Top 50 Advance-Level MATLAB Simulink Interview Questions
- Fast-Charging Technology Might Be As Rapid As Filling Up A Tank, According To Chinese EV Manufacturer BYD
- Automotive Functional Safety (ISO 26262) Vs Safety Of The Intended Functionality (SOTIF – ISO 21448): What’s The Difference?
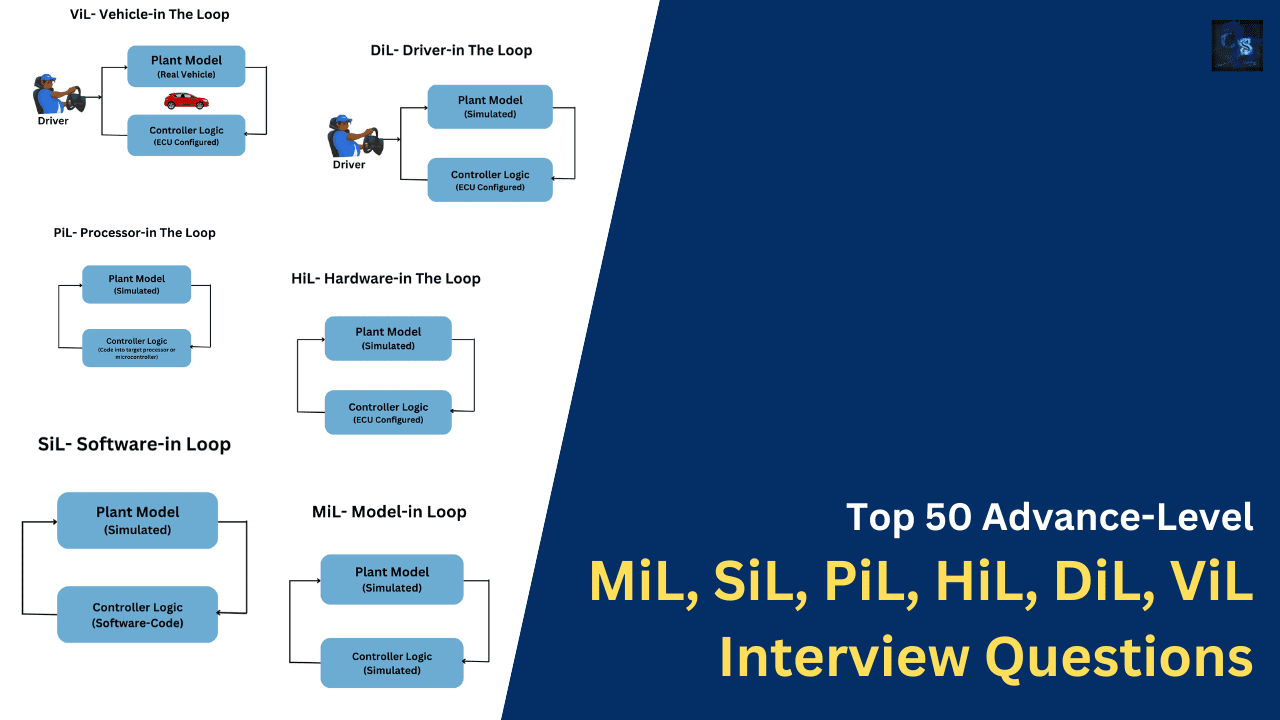
MiL, SiL, PiL, HiL, DiL, ViL Interview Questions
The automotive industry is rapidly evolving with advancements in electrification, autonomous driving, and real-time control systems. To ensure the safety, reliability, and performance of Electronic Control Units (ECUs) and embedded software, various testing methodologies are used throughout the development lifecycle.
01. What is Model-in-the-Loop (MiL) testing, and why is it used?
Answer: Model-in-the-loop (MiL) is a simulation-based testing approach where control algorithms are tested using mathematical models in a simulation environment before actual software development. It helps in the early validation of control logic, reduces errors in later stages, and ensures functional correctness before hardware implementation.
02. How does Software-in-the-Loop (SiL) testing differ from MiL testing?
Answer: SiL involves testing the actual embedded software compiled into machine code, while MiL tests high-level control logic in a modeling environment. SiL helps identify issues related to software integration, numerical precision, and code optimization.
03. What is the importance of Hardware-in-the-Loop (HiL) testing in automotive development?
Answer: HiL testing involves integrating real electronic control units (ECUs) with a simulation of the vehicle environment to validate their functionality under real-world conditions. It ensures software robustness, detects faults early and reduces dependency on physical prototypes.
04. Explain Processor-in-the-Loop (PiL) testing and its benefits.
Answer: PiL testing validates the execution of embedded code on the actual target processor or microcontroller. It helps identify timing issues, numerical precision errors, and processor-specific constraints that may not appear in SiL or MiL.
05. What is Vehicle-in-the-Loop (ViL) testing, and in which scenarios is it used?
Answer: ViL testing involves real vehicles interacting with simulated environments or test benches. It is used for testing ADAS (Advanced Driver Assistance Systems), sensor fusion, and vehicle dynamics under controlled conditions.
06. How does Driver-in-the-Loop (DiL) testing differ from ViL?
Answer: DiL includes a human driver in the simulation loop, allowing real-time interaction with vehicle systems. It is mainly used for driver behavior studies, ergonomics evaluation, and ADAS testing in immersive environments.
07. What are the advantages of MiL testing?
Answer:
- Early detection of functional errors
- No need for embedded hardware
- Cost-effective as it avoids hardware dependencies
- Simplifies debugging and traceability
08. What are the limitations of MiL testing?
Answer:
- Lacks real-time execution constraints
- Does not account for hardware-specific issues
- Performance bottlenecks may not be identified
09. What tools are commonly used for MiL testing?
Answer: MATLAB/Simulink, dSPACE TargetLink, ETAS ASCET, and ANSYS SCADE.
10. How does MiL help in verifying safety-critical automotive software?
Answer: MiL ensures early-stage validation of functional requirements and compliance with safety standards such as ISO 26262.
11. Why is SiL testing critical in automotive software validation?
Answer: SiL tests the actual embedded software before deploying it on hardware, ensuring software integrity, correct algorithm implementation, and detecting numerical precision issues.
12. What are the key challenges in SiL testing?
Answer:
- Debugging complex software structures
- Ensuring compatibility with hardware constraints
- Managing memory and computation limitations
13. How is code coverage evaluated in SiL?
Answer: By using tools like VectorCAST, Polyspace, and LDRA, which measure structural coverage (statement, branch, and MC/DC coverage).
14. What is back-to-back testing between MiL and SiL?
Answer: Back-to-back testing compares MiL and SiL outputs to verify consistency between high-level models and compiled code.
15. What are the key components of a HiL setup?
Answer:
- Real-time simulation hardware
- ECUs under test
- Sensor and actuator interfaces
- Test automation software
16. How does HiL testing help in ADAS validation?
Answer: HiL enables ADAS testing by simulating real-world driving conditions, including sensor inputs from LiDAR, radar, and cameras.
17. What are some commonly used HiL platforms?
Answer: dSPACE SCALEXIO, National Instruments VeriStand, Vector CANoe, and ETAS LABCAR.
18. How does fault injection testing work in HiL?
Answer: It simulates sensor failures, communication errors, and electrical faults to validate system robustness.
19. How does HiL testing contribute to ISO 26262 compliance?
Answer: HiL provides controlled testing of safety-critical systems, ensuring functional safety through systematic validation.
20. What are the biggest challenges in HiL testing?
Answer:
- High initial setup cost
- Complex system integration
- Real-time execution synchronization
21. What is the main objective of PiL testing?
Answer: To validate the execution of generated code on the actual target processor, ensuring compatibility and real-time performance.
22. How is PiL different from SiL?
Answer: PiL runs software on the actual microcontroller, considering real-time execution constraints, while SiL runs software in a simulated environment.
23. Why is PiL testing necessary for powertrain and battery management systems?
Answer: Because real-time constraints and processor performance must be validated for efficient power control.
24. How does ViL testing support autonomous vehicle development?
Answer: It allows real vehicles to interact with virtual environments, enabling safe and repeatable testing of ADAS and self-driving algorithms.
25. What are the key challenges in ViL testing?
Answer:
- Synchronization between real and virtual elements
- Accurate sensor emulation
- Ensuring repeatability
26. What is the primary application of DiL testing?
Answer: It evaluates driver behavior, ergonomics, and ADAS effectiveness under real-world scenarios.
27. How is a DiL setup different from a driving simulator?
Answer: A DiL setup integrates actual vehicle control systems, whereas a driving simulator may only use graphical environments.
28. How do you validate control algorithms in MiL?
Answer: Validation is done by:
- Running test cases to check expected vs. actual behavior
- Using requirement-based testing to verify specifications
- Performing closed-loop simulation with plant models
- Conducting back-to-back comparisons with SiL results
29. How is requirement traceability ensured in MiL testing?
Answer: By using tools like MATLAB/Simulink Test Manager, IBM DOORS, and Polarion to link test cases with system requirements.
30. What are the key performance metrics for MiL testing?
Answer:
- Functional correctness
- Simulation accuracy
- Computational efficiency
- Requirement coverage
31. What are the challenges of transitioning from MiL to SiL?
Answer:
- Handling numerical precision differences between model and code
- Ensuring simulation time-step consistency
- Verifying compiler optimizations
32. How do you ensure software robustness in SiL?
Answer:
- Stress testing with boundary conditions
- Fault injection testing
- Memory and stack usage monitoring
33. What role does static analysis play in SiL?
Answer: Static analysis tools like Polyspace and CodeSonar detect coding errors, buffer overflows, and compliance issues with MISRA C guidelines.
34. How do you set up a HiL system for an electric vehicle (EV)?
Answer:
- Integrate real ECUs with a simulated EV powertrain model
- Use real-time simulators like dSPACE or Opal-RT
- Simulate battery, motor, and inverter behavior
- Test regenerative braking and thermal management
35. What is fault tolerance testing in HiL?
Answer: It assesses how ECUs handle faults like sensor failures, actuator malfunctions, and network errors by injecting faults into the system.
36. How is CAN communication tested in HiL?
Answer: Using Vector CANoe, dSPACE ControlDesk, or NI VeriStand to monitor, inject errors, and analyze CAN bus communication.
37. What safety measures are necessary for a HiL test bench?
Answer:
- Emergency shutdown mechanisms
- Overvoltage and overcurrent protection
- Isolation of high-power components
38. How does PiL testing help in real-time execution analysis?
Answer: PiL ensures that the generated embedded code meets real-time constraints, including execution time, interrupt handling, and memory usage.
39. What profiling tools are used in PiL testing?
Answer:
- ARM Keil µVision
- Lauterbach TRACE32
- STM32CubeMonitor
40. How do you handle floating-point precision issues in PiL?
Answer:
- Use fixed-point arithmetic where possible
- Optimize numerical algorithms
- Compare results with MiL/SiL outputs
41. What are the key elements of a ViL setup?
Answer:
- Real vehicle with a controlled test environment
- Simulation tools like CarSim, dSPACE ASM
- External test rigs for real-time interaction
42. What role does sensor fusion play in ViL testing?
Answer: It integrates data from LiDAR, radar, and cameras to validate ADAS and autonomous driving algorithms.
43. How does ViL testing improve ADAS calibration?
Answer: It enables dynamic testing of features like lane-keeping assist, adaptive cruise control, and emergency braking in real-world conditions.
44. What are the use cases of DiL testing in autonomous vehicle development?
Answer:
- Evaluating driver takeover scenarios in Level 3 automation
- Analyzing human-machine interaction
- Testing driver distraction and fatigue detection
45. How does DiL testing contribute to ergonomic validation?
Answer: It assesses human factors like seating comfort, pedal/steering response, and infotainment accessibility.
46. What challenges exist in synchronizing DiL with real-time simulation?
Answer:
- Latency in human response time
- Accurate replication of road feel and feedback
- Integration of real-world scenarios
47. How do you test control algorithms for stability in MiL?
Answer:
- Perform step response analysis to check overshoot, settling time, and steady-state error.
- Use Bode plots and Nyquist diagrams to assess system stability.
- Implement Lyapunov stability criteria for nonlinear controllers.
- Validate closed-loop performance with real-world disturbances.
48. What are the key challenges in MiL testing for adaptive control systems?
Answer:
- Non-deterministic behavior: Adaptive controllers modify parameters in real time, making it harder to predict outcomes.
- Complex validation: Standard test cases may not cover all possible parameter variations.
- Computational overhead: Simulating high-fidelity models with adaptive algorithms requires significant processing power.
49. How do you automate MiL test execution?
Answer:
- Use MATLAB Test Manager to create and execute test cases.
- Implement Python scripting (PyTest, Robot Framework) for batch execution.
- Integrate Jenkins or GitLab CI/CD to automate regression testing.
- Use Simulink Design Verifier for test case generation.
50. How do you verify functional safety requirements in MiL?
Answer:
- Define safety goals based on ISO 26262 ASIL levels.
- Perform requirement-based testing with pass/fail criteria.
- Use fault tree analysis (FTA) and failure mode effect analysis (FMEA) to identify risks.
- Validate model outputs with expected functional safety constraints.
51. How do you handle floating-point precision errors in SiL testing?
Answer:
- Use fixed-point arithmetic to improve numerical accuracy.
- Enable compiler optimizations that maintain precision.
- Compare double-precision and single-precision results in MiL and SiL.
52. What are common runtime issues detected in SiL testing?
Answer:
- Memory leaks due to improper dynamic memory allocation.
- Stack overflows are caused by recursive functions or excessive local variable storage.
- Race conditions in multi-threaded applications.
- Undefined behavior due to uninitialized variables.
53. What techniques are used to optimize SiL test coverage?
Answer:
- Use MC/DC (Modified Condition/Decision Coverage) analysis to ensure complete branch testing.
- Implement mutation testing to evaluate test robustness.
- Conduct boundary value analysis for all input parameters.
- Use static analysis tools (Polyspace, LDRA, VectorCAST) to detect unreachable code.
54. How do you conduct stress testing in SiL?
Answer:
- Simulate high CPU loads by running multiple instances of SiL tests.
- Inject noise and disturbances into input signals.
- Test worst-case execution time (WCET) for real-time constraints.
- Overload communication interfaces (CAN, Ethernet) to check software resilience.
55. How do you validate an automotive HiL setup for ECU testing?
Answer:
- Perform open-loop validation by feeding predefined input signals and comparing output.
- Conduct closed-loop testing by integrating real-time vehicle dynamics models.
- Use hardware fault injection (e.g., short circuits, overvoltage conditions).
- Compare HiL test results with real vehicle test data for correlation.
56. What are key considerations when simulating powertrain systems in HiL?
Answer:
- Real-time computation speed to simulate motor and engine dynamics.
- High-speed data acquisition to capture transient behaviors.
- Thermal modeling to validate power losses and cooling efficiency.
- Battery aging models for electric vehicle (EV) testing.
57. What are common failure modes tested in HiL?
Answer:
- Sensor failures (e.g., disconnected, shorted, out-of-range).
- Communication errors (e.g., CAN bus overload, packet loss).
- Actuator malfunctions (e.g., stuck throttle, brake system faults).
- Power system failures (e.g., low-voltage conditions, battery faults).
58. How do you ensure real-time performance in HiL?
Answer:
- Use low-latency real-time OS (RTOS) like dSPACE SCALEXIO or NI VeriStand.
- Optimize model discretization time step to match ECU execution speed.
- Ensure synchronization between HiL hardware and ECU through FPGA-based control.
59. What factors affect real-time execution performance in PiL?
Answer:
- Processor architecture (e.g., ARM Cortex, PowerPC).
- Clock speed and interrupt handling.
- Memory access latency (RAM vs. Flash).
- Compiler optimizations and inline assembly usage.
60. How do you profile execution time in PiL?
Answer:
- Use hardware performance counters (e.g., STM32CubeMonitor, Lauterbach TRACE32).
- Measure execution cycles using RTOS profiling tools.
- Implement instrumentation code for logging timestamps.
61. How do you ensure repeatability in ViL tests?
Answer:
- Use GPS-based vehicle positioning for consistent test scenarios.
- Calibrate sensor inputs before each test.
- Control environmental conditions (e.g., road surface, temperature).
- Automate test execution with robotic actuators.
62. What are the challenges in testing electric vehicles (EVs) in ViL?
Answer:
- Battery SOC variability affecting performance metrics.
- Regenerative braking inconsistencies across test runs.
- Thermal impact on motor efficiency during extended tests.
- High-voltage safety considerations when interfacing with test benches.
63. How do you validate driver response times in DiL simulations?
Answer:
- Use eye-tracking systems to measure attention and reaction delays.
- Log pedal and steering inputs with high-resolution timestamps.
- Simulate unexpected obstacles to assess emergency braking response.
64. What role does machine learning play in DiL testing?
Answer:
- Predictive driver modeling based on historical driving patterns.
- Anomaly detection for fatigue and distraction analysis.
- Real-time feedback adjustment for adaptive driving simulations.
65. How do you integrate HiL with cloud-based simulations?
Answer:
- Use AWS, Azure, or Google Cloud for remote test execution.
- Stream real-time data using 5G or edge computing solutions.
- Implement digital twins to run large-scale simulations.
66. How do you test cybersecurity vulnerabilities in MiL/SiL/HiL?
Answer:
- Perform fuzz testing to inject random data into ECU interfaces.
- Simulate CAN bus spoofing attacks to test resilience.
- Implement penetration testing using tools like Kali Linux.
This was about “Top 50 Advance-Level MiL, SiL, PiL, HiL, DiL, ViL Interview Questions“. Thank you for reading.
Also, read:
- “Mother of All Deals”: How The EU–India Free Trade Agreement Can Reshape India’s Economic Future
- 10 Free ADAS Projects With Source Code And Documentation – Learn & Build Today
- 100 (AI) Artificial Intelligence Applications In The Automotive Industry
- 1000+ Automotive Interview Questions With Answers
- 2024 Is About To End, Let’s Recall Electric Vehicles Launched In 2024
- 2026 Hackathons That Can Change Your Tech Career Forever
- 50 Advanced Level Interview Questions On CAPL Scripting
- 7 Ways EV Batteries Stay Safe From Thermal Runaway