Hello guys, welcome back to our blog. Here in this article, we will discuss what is solver in MATLAB Simulink, the difference between fixed-step and variable-step solvers, types of fixed-step and variable-step solvers, and their applications.
Ask questions if you have any electrical, electronics, or computer science doubts. You can also catch me on Instagram – CS Electrical & Electronics.
Also, read:
- Top 11 Free Courses On Battery For Engineers With Documents
- What Is Vector CANoe Tool, Why It Is Used In The Automotive Industry
- What Is TCM, Transmission Control Module, Working, Purpose
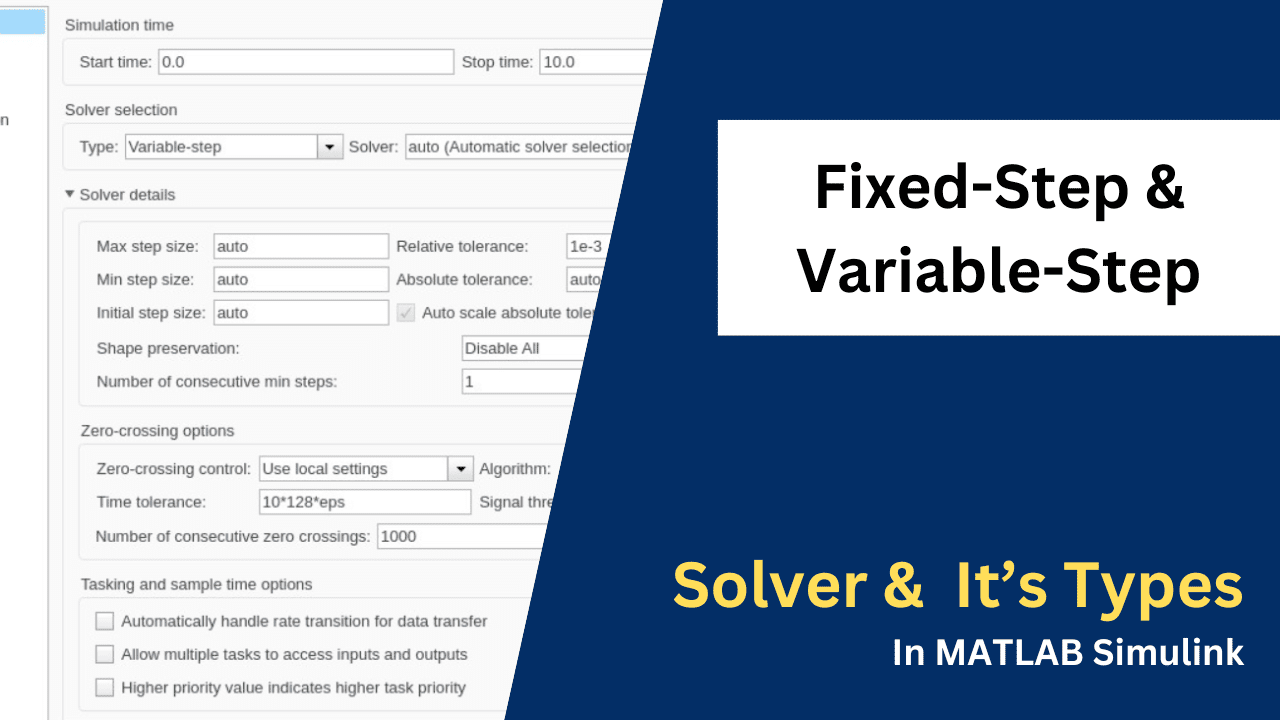
Solver In MATLAB Simulink
In MATLAB Simulink, a solver acts as the computational engine that drives dynamic system simulations forward in time. It performs the essential task of numerically approximating the solution to differential equations that define the behavior of the system under study. Solvers are pivotal components in various engineering and scientific disciplines, facilitating the analysis of complex systems and aiding in the design and optimization of control strategies and algorithms.
These solvers employ advanced numerical techniques to approximate the system’s behavior over time, allowing engineers and researchers to predict system responses to different inputs and conditions accurately. They are designed to handle a wide range of dynamic systems, from simple mechanical systems to intricate multi-domain models encompassing electrical, mechanical, and hydraulic components.
The solver algorithms in MATLAB Simulink are carefully crafted to balance computational efficiency with solution accuracy. They leverage sophisticated numerical methods and optimization strategies to deliver reliable and high-fidelity simulation results across diverse applications. Users can configure solver settings according to their specific simulation requirements, adjusting parameters such as step size, integration method, and error tolerances to achieve the desired balance between accuracy and computational cost.
With the flexibility and power of MATLAB Simulink solvers, engineers can explore and analyze the behavior of complex dynamic systems in a virtual environment, enabling rapid prototyping, testing, and validation of control strategies and system designs. This capability accelerates the development cycle of engineering projects, leading to faster innovation and more robust solutions to real-world challenges.
Solver Selection Types
Fixed-step and variable-step solvers are two fundamental types of algorithms used in numerical simulations, particularly in systems modeled with MATLAB Simulink. These solvers play a crucial role in approximating the behavior of dynamic systems described by differential equations.
01. Fixed-step solvers advance the simulation time by a constant increment at each time step. This fixed increment, also known as the step size, is predetermined by the user and remains constant throughout the simulation.
Examples of fixed-step solvers include the Euler method and various Runge-Kutta methods. These solvers are often preferred when the system dynamics are relatively smooth and predictable. Their constant step size contributes to computational efficiency, making them suitable for real-time simulations and scenarios where rapid iteration is necessary.
02. In contrast, variable-step solvers dynamically adjust the step size during simulation based on the behavior of the system. These solvers continuously monitor the system’s dynamics and adapt the step size to ensure accurate results. Variable-step solvers are particularly beneficial for systems with varying dynamics, nonlinearities, or discontinuities. They automatically increase the step size during periods of stability and decrease it when rapid changes occur, optimizing computational resources while maintaining accuracy.
Variable-step solvers use sophisticated adaptive algorithms, such as the ODE45 solver in MATLAB, which combines the Runge-Kutta method with a variable step-size control mechanism. This approach allows the solver to achieve high accuracy without sacrificing computational efficiency. By dynamically adjusting the step size, variable-step solvers can capture intricate system behavior and provide reliable simulation results across a wide range of scenarios.
The choice between fixed-step and variable-step solvers depends on several factors, including the nature of the system being modeled, the desired level of accuracy, and the computational resources available. Fixed-step solvers are suitable for systems with relatively smooth dynamics and strict real-time requirements, where computational efficiency is paramount. Variable-step solvers are more appropriate for systems with complex or unpredictable behavior, where accuracy is a primary concern.
In MATLAB Simulink, users can easily select and configure the desired solver type within the model environment. They can specify parameters such as step size, error tolerances, and integration methods to tailor the solver’s behavior to the specific requirements of their simulation. This flexibility enables engineers and researchers to strike a balance between accuracy and computational efficiency, ensuring that their simulation results are both reliable and practical.
Both fixed-step and variable-step solvers have their advantages and limitations, and the choice between them often depends on the specific characteristics of the system under study. By understanding the principles behind these solver types and their respective strengths, users can make informed decisions when designing simulations and analyzing system behavior. In summary, fixed-step solvers offer efficiency and simplicity, while variable-step solvers provide accuracy and adaptability, making them indispensable tools for dynamic system modeling and simulation.
Types of Fixed-step & Variable-step Solvers
In MATLAB Simulink, fixed-step and variable-step solvers each offer distinct types to accommodate different simulation needs. Let’s explore the types of solvers available in each category:
Fixed-Step Solvers:
01. Euler Solver: The Euler solver is one of the simplest fixed-step solvers available in MATLAB Simulink. It advances simulation time by a fixed step size, computing the system’s state at each time step based on the current state and dynamics. While computationally efficient, the Euler method may sacrifice accuracy, especially for systems with rapidly changing dynamics, due to its first-order approximation.
02. Runge-Kutta Solver: Runge-Kutta solvers are a family of fixed-step methods that offer higher accuracy than the Euler method. Among them, the classic fourth-order Runge-Kutta (RK4) solver is widely used for its balance between accuracy and computational efficiency. These solvers compute intermediate states using weighted averages of multiple function evaluations, resulting in more accurate approximations of the system’s behavior over time.
03. Implicit Fixed-Step Solver: Implicit fixed-step solvers use implicit methods to advance simulation time. Unlike explicit methods, implicit methods require solving nonlinear equations at each time step, which can be computationally more intensive but often more stable, particularly for stiff systems. These solvers offer improved stability and accuracy, making them suitable for systems with stiff dynamics or discontinuities.
Variable-Step Solvers:
01. ODE45 Solver: ODE45 is a variable-step solver based on the Dormand-Prince method, a variant of the Runge-Kutta method. It dynamically adjusts the step size during simulation to maintain accuracy, making it suitable for a wide range of ordinary differential equation (ODE) problems. ODE45 automatically switches between different orders of the Runge-Kutta method to balance accuracy and efficiency, providing reliable solutions for various dynamic systems.
02. ODE23 Solver: ODE23 is another variable-step solver based on the Runge-Kutta method, optimized for moderately stiff ODEs. It offers efficiency and accuracy, making it suitable for a wide range of applications. ODE23 dynamically adjusts the step size and order of approximation to ensure accurate solutions, particularly for systems with moderate stiffness and smooth dynamics.
03. Backward Differentiation Formula (BDF) Solver: BDF solvers are implicit variable-step methods commonly used for stiff ODEs. These solvers compute the system state at each time step by solving a system of algebraic equations, offering stability and accuracy for stiff systems. BDF solvers adjust the step size dynamically to capture the system’s behavior accurately, making them suitable for systems with stiff or rapidly changing dynamics.
04. Adams-Bashforth method: Uses past function values to predict future values. Imagine driving a car and estimating how far you’ll go based on your current speed and recent acceleration.
05. Adams-Moulton method: Similar to Adams-Bashforth, but also uses future information (if available) to improve accuracy. Think of looking slightly ahead on the road while driving to adjust your speed prediction.
These types of solvers in MATLAB Simulink provide users with a range of options to simulate dynamic systems accurately and efficiently. The choice of solver depends on factors such as the system’s dynamics, stiffness, accuracy requirements, and computational resources available. By selecting the appropriate solver type and fine-tuning its parameters, users can ensure reliable and efficient simulation results for their specific applications.
Applications of Solver Used In MATLAB Simulink
The application and purpose of solvers in MATLAB Simulink are central to simulating dynamic systems accurately and efficiently. Here’s a detailed exploration of their application and exact purpose:
Application:
01. Control Systems Design: Solvers play a vital role in designing and simulating control systems. Engineers use Simulink to model various control strategies, such as PID (Proportional-Integral-Derivative) controllers, state-space controllers, and model predictive controllers. Solvers simulate the dynamic behavior of these systems under different operating conditions, allowing engineers to evaluate performance metrics like stability, transient response, and steady-state error.
02. Mechanical Systems Simulation: Solvers are extensively used to model and simulate mechanical systems, including mechanical linkages, gears, motors, and actuators. Engineers can analyze the motion, forces, and torques within these systems, enabling them to optimize designs, predict performance, and troubleshoot issues before physical prototyping.
03. Electrical Circuits Analysis: Solvers facilitate the simulation of electrical circuits, including analog and digital circuits, power electronics, and control systems. Engineers can model complex circuit topologies, simulate transient and steady-state responses, and analyze phenomena such as voltage spikes, current surges, and electromagnetic interference (EMI).
04. Signal Processing: In signal processing applications, solvers are used to model and simulate digital signal processing (DSP) algorithms, such as filters, transforms, and modulators/demodulators. Engineers can analyze the effects of different signal processing techniques on signals, including noise reduction, frequency spectrum analysis, and signal modulation/demodulation.
05. Renewable Energy Systems: Solvers are employed to model renewable energy systems, such as photovoltaic (PV) arrays, wind turbines, and energy storage systems. Engineers can simulate the dynamic behavior of these systems under varying environmental conditions, assess their performance, and optimize control strategies for maximum energy harvesting and grid integration.
Purpose:
01. Numerical Integration: The primary purpose of solvers is to perform numerical integration of the differential equations that describe the behavior of dynamic systems. Solvers advance simulation time by computing the system’s state at successive time steps, allowing engineers to track the system’s evolution over time.
02. Accuracy: Solvers ensure that simulation results are accurate and reliable by employing advanced numerical methods and adaptive algorithms. Variable-step solvers dynamically adjust the step size to maintain accuracy, particularly in systems with variable dynamics, nonlinearities, or discontinuities.
03. Efficiency: Solvers optimize computational resources by balancing accuracy with computational efficiency. Fixed-step solvers offer simplicity and speed, making them suitable for real-time simulations and scenarios where rapid iteration is necessary. Variable-step solvers adaptively adjust the step size to optimize computational efficiency while maintaining accuracy.
04. System Analysis: Solvers enable engineers to analyze the dynamic behavior of systems under various operating conditions, helping them understand system performance, identify design flaws, and explore optimization opportunities. Engineers can assess system stability, transient response, frequency characteristics, and other performance metrics using simulation results.
05. Model Validation and Verification: Solvers facilitate model validation and verification by comparing simulation results with experimental data or analytical solutions. Engineers can ensure that the simulation accurately represents the real-world behavior of the system, validating design decisions and verifying the effectiveness of control strategies and algorithms.
In summary, solvers in MATLAB Simulink serve the critical purpose of numerically integrating differential equations to simulate the dynamic behavior of systems accurately and efficiently across diverse applications in engineering and science. They enable engineers to design, analyze, and optimize complex systems, leading to improved performance, reliability, and innovation in various fields.
This was about “Solver In MATLAB Simulink“. I hope this article may help you all a lot. Thank you for reading.
Also, read:
- NVIDIA vs India’s GDP: How One AI Chip Company Became One of the Most Valuable Companies in the World
- India’s GaN Chip Breakthrough: Why Gallium Nitride Could Shape the Future of Defense Electronics
- India’s Chip Era Begins: A New Chapter in Semiconductor Manufacturing
- FlexRay Protocol – Deep Visual Technical Guide
- Top 50 AI-Based Projects for Electronics Engineers
- UDS (Unified Diagnostic Services) — Deep Visual Technical Guide
- Automotive Ethernet — Deep Visual Technical Guide
- Controller Area Network (CAN) — Deep Visual Technical Guide